
Soma Cube 求解器
5.00/5 (6投票s)
WPF 3D 图形程序,用于解决 Soma Cube 拼图

引言
该项目使用回溯算法来解决 Soma Cube 谜题,并允许您使用 WPF 渲染的 3D 图像来可视化算法的工作原理。
背景
我最近发现了 Kazem Jahanbakhsh 提出的一个有趣的 Soma Cube 求解算法。Soma Cube 是我 Soma Cube WPF 项目的主题。如果您不熟悉 Soma Cube 谜题,您可能需要阅读该文章以熟悉棋子的名称、棋子的立方体标签以及如何定向相机。
该算法首先放置 L 四面体,然后放置分支四面体,使其不与 L 四面体相交,然后放置右螺旋四面体,使其不与前两个棋子相交,依此类推,直到解开谜题。该算法使用一种称为回溯的技术。我所说的回溯是指,当算法在放置棋子时,如果一个棋子无法放置,则当前迭代停止,并使用不同的初始条件开始一个新的迭代。下面我将详细介绍算法的工作原理。
Using the Code
下载并解压解决方案,然后用 Visual Studio 打开 SomaCubeSolver.sln。它由以下项目组成
SomaCubeSolver- Kazem Jahanbakhsh 的 Java 代码,已转换为 C#。它生成的解决方案输出文件与 Java 版本相同(我使用 Eclipse Kepler Service Release 1 Build id: 20130919-0819 运行 Java 代码)。解决方案输出文件的名称是 solutions.txt。我在 Java 代码的基础上进行了一些小的改进:添加了注释;使用了Dictionary而不是HashTable;使用了const而不是硬编码的数字;并使用了整数作为Dictionary键而不是字符串。SomaCubeWPF2- 一个 WPF 3D 应用程序,用于帮助可视化算法的运行。它使用SomaCubeSolver生成的文件,而 Java 版本不生成该文件。利用该文件,我将向您展示如何动画算法的运行。效果非常酷。SomaCubeWPF2还有一个 UI,可以轻松可视化算法如何使用BitArray类。SomaCubeLib- 由SomaCubeWPF2和SomaCubeSolver共享的库。
使用 Visual Studio 主菜单中的“生成”->“重新生成解决方案”来生成解决方案。由于前两个项目依赖于 SomaCubeLib 项目,因此该项目会先生成。Visual Studio 的一个不错的功能是通过右键单击解决方案,然后选择“项目生成顺序...”来设置此生成顺序。
立方体坐标和位数组
位数组
该算法的核心是 .NET BitArray 类。我使用这个类,因为它最接近 .NET 中 Java BitSet 类,而 Java BitSet 类用于原始 Java 代码。但是,Java BitSet 有一些 .NET BitArray 类缺失的方法,例如 AndNot 方法。我使用 C# 的出色扩展方法功能包含了缺失的方法。它们位于 SomaCubeLib 项目的 ExtensionMethods 类中。
立方体坐标
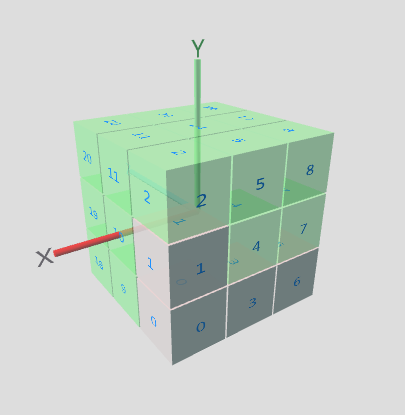
为了理解该算法,我们首先需要理解立方体坐标。想象一下将 27 个小立方体组装成一个单独的大 Soma Cube 并以原点为中心。小立方体编号为 0 - 26,其中立方体 0 位于 +1, -1, -1;立方体 1 位于立方体 0 上方 +1, 0, -1;立方体 2 位于立方体 2 上方 +1, +1, -1;立方体 3 位于立方体 1 旁边 0, -1, -1,依此类推,总共 27 个小立方体。您可能想花点时间熟悉一下如下图所示的编号系统(您还可能想打印 CubeNet.png,剪下图像并组装一个大型立方体的纸模型,显示编号的小立方体。)我们假设每个小立方体都是一个单位立方体,即其高度、宽度和深度均为一个单位。

算法
我将很快详细介绍算法,但作为高层次的介绍,我们首先假设我们从所有小立方体都为空的状态开始 Soma Cube。然后,我们将 L 四面体放置在小立方体位置 1、0、3 和 6,如下图所示。相应的 BitArray 对象将只有其 0、1、3 和 6 位被设置。换句话说,在表示大立方体的 BitArray 对象中,清除的位(0)表示小立方体未被占用,而设置的位(1)表示小立方体已被占用。图中未被占用(清除或 0)的小立方体显示为浅绿色,已被占用(设置或 1)的小立方体显示为灰色。(我很快会向您展示如何设置除灰色以外的颜色。)
当算法运行时,策略是跟踪哪些小立方体被占用,哪些未被占用。如果小立方体未被棋子占用,算法将棋子放入空的小立方体中。例如,假设在算法运行一段时间后,除了立方体 22、25 和 26 之外,所有小立方体都被占用了,如下图所示(拥有您的纸模型对于想象这一点很有用。)算法随后可以确定 L 三面体可以放入此形状,因此将将其放置在未被占用的空间中,从而完成大 Soma Cube。

位运算 - 或、与、与非
在进入算法代码之前,我想谈谈我开发的一个工具,该工具用于帮助可视化 BitArray 对象上的位运算。如果您熟悉位运算,可以跳过本节。下图中,左侧,蓝色边框中的 27 位序列代表右侧的大 Soma Cube。紫色边框中的 27 位序列代表位(辅助位),这些位可以通过单选按钮或在标记为“十六进制数”的文本框中输入的十六进制数来设置。绿色边框中的 3 个按钮代表可以通过紫色边框中的位(辅助位)对蓝色边框中的位(立方体)执行的操作。按钮和操作是
- 或 - 设置大 Soma Cube 中的位为 1 以添加棋子
- 与 - 设置大 Soma Cube 中的位为 0 以测试是否可以添加棋子
- 与非 - 清除大 Soma Cube 中对应位在指定
BitArray中被设置的所有位;这用于移除棋子
“或”运算
要查看“Or”运算,例如,在大 Soma Cube 的 +Z 面上设置 S 四面体,请单击位 19、21、22 和 24 的单选按钮将其设置为 1。或在“十六进制数”文本框中输入 B4 并按“Enter”。位串“000 000 000 000 000 000 010 110 100”将显示在辅助位(紫色边框中的位)中。现在单击绿色边框区域中的“或”,并观察蓝色边框区域中的位与辅助位相同,并且大 Soma Cube 中相应的小立方体显示为灰色,表示它们已被占用,如下图所示。(此颜色可以在 app.Config 的 SmallCubeSetColor 中设置。)

要添加另一个棋子,例如 T 四面体,请单击位 0、9、10 和 18 的单选按钮将其设置为 1,或在“十六进制数”文本框中输入 40301B4 并按“Enter”。位串“100 000 000 110 000 000 110 110 100”将显示在辅助位中。接下来,单击菜单栏上的颜色并选择 T 四面体的颜色,然后单击绿色边框区域中的“或”,并观察蓝色边框区域中的位与辅助位相同,并且大 Soma Cube 中相应的小立方体显示为新的颜色,表示它们已被占用,如下图所示。随着算法的进展,它在代码中使用此“或”方法 - 像这样 theCube.Or(tempPiece) - 将棋子添加到大 Soma Cube 中,我们稍后将更详细地检查。

“与”运算
要查看“And”的工作原理,请按上面所述设置 S 和 T 四面体。单击紫色边框区域中的“清除”按钮。所有辅助位都已清除。假设我们想查看 L 三面体是否能放入大 Soma Cube 的位置 23、25 和 26。单击位 23、25 和 26,或在“十六进制数”文本框中输入 B 并按“Enter”。单击绿色边框区域中的“与”,并观察所有小立方体如何被清除,使大 Soma Cube 为空。算法使用此“And”方法来确定是否可以添加棋子。我们稍后会在一行代码 if (tempCube.IsEmpty()) 中看到这一点,以查看棋子是否能放入。
“与非”运算
要查看“AndNot”的工作原理,请按上面所述设置 S 和 T 四面体。单击紫色边框区域中的“清除”按钮。所有辅助位都已清除。将位 19、21、22 和 24 设置为 1,或在“十六进制数”文本框中输入 B4 并按“Enter”。这些位代表 S 四面体。单击绿色边框区域中的“与非”。请注意 S 四面体如何从大 Soma Cube 中移除。算法使用此“AndNot”方法来移除棋子。我们稍后会在一行代码 theCube.AndNot(tempPiece) 中看到这一点。
菜单栏“视图”
您可以使用菜单栏上的视图来关闭大 Soma Cube 的部分。例如,要查看非常中心的第 13 个小立方体,请单击“视图”->“+Z 层隐藏”。要恢复该层,请单击“+Z 层可见”。
非同构方向
既然我们已经涵盖了立方体坐标和位运算,接下来要理解的是零件的非同构方向。因为同构意味着“相同的形状”,例如,T 四面体在绕其 Y 轴旋转 180° 后具有“相同的形状”,如下图所示(请注意,面标签和轴不同,这表明它实际上被旋转了!)这是一个同构方向的例子。

相比之下,非同构旋转意味着零件在绕其 Y 轴旋转 180° 后具有“不同的形状”,如下图所示的 L 三面体。

每个零件的非同构方向存储在一个三维数组中。每个方向(在下面的代码片段中用 case 1、case 2 等表示)由 4 个 3D 点组成。对于 T 四面体,我用图示说明了轴和零件,使用立方体标签来显示方向。因此,例如,对于 case 1,零件沿 -Z 轴(因为所有 4 个点的 Z 均为 -1),T 四面体方向如下图所示。
大写字母 - D、B、A 和 C - 指的是第 1 部分中描述的零件的立方体标签。立方体标签显示在包含 4 个点的代码行上面的注释中。以下是 T 四面体非同构方向的代码片段
int[,,] TTetraCubeNonIsoOrient =
{
// D B A C
// cube 4 cube 1 cube 2 cube 0
{{ 0, 0, -1}, {+1, 0, -1}, {+1, +1, -1}, {+1, -1, -1}}, // case 1 Z=-1
#region doc
// +Y
// |
// A |
// B D--- -X
// C
// Freedom of movement will be {-1, 0, +2}
#endregion
// A B C D
// cube 5 cube 4 cube 3 cube 1
{{-1, -1, -1}, { 0, -1, -1}, {+1, -1, -1}, { 0, 0, -1}}, // case 2 Z=-1
#region doc
// +Y
// |
// D--- +X
// A B C
// Freedom of movement will be { 0, +1, +2}
#endregion
...
Case 1 在下图的 Z=-1 平面上显示

在 Z=-1 平面上有 3 个其他方向,在 -X 平面上有 4 个,在 -Y 平面上有 4 个,总共 12 个方向。
除了这 12 个非同构方向中的每一个之外,还有一个三维整数数组,指示零件可以移动多少(您可以将其视为零件的“移动自由度”)。因此,对于 case 1,当 T 四面体在 Z=-1 平面和 X=+1 平面垂直方向时,移动自由度为 {-1, 0, +2},这意味着零件可以沿 -X 方向移动 1 个单位,沿 Z 方向移动 2 个单位,并且不能沿 Y 方向移动(因为 T 四面体的高度为 3 个单位,与大 Soma Cube 相同。) 12 个移动自由度数组存储在二维数组 int[][] TTetraCubeFreedomOfMovement 中,在此示例中,二维数组是 12x3 的,因为有 12 个方向。
非同构方向的排列
给定七个 Soma 零件的方向和移动自由度,下一个挑战是确定特定方向的所有可能性。存储零件各种非同构方向的关键数据结构是一个 BitArray 对象列表:List<BitArray>。值得重复的是,每个 BitArray 对象有 27 位,每一位对应于上面显示的编号方案中的一个小立方体。清除的位(0)表示小立方体未被占用,而设置的位(1)表示小立方体已被占用。由于我们为七个 Soma 零件中的每一个都有一个列表,我们将使用一个由七个列表组成的数组来跟踪方向:pieceOrientationList = new List<BitArray>[NumPieces]。
FillPieceOrientationList() 方法获取非同构和移动自由度数组并构建方向列表。例如,对于 T 四面体,将 TTetraCubeNonIsoOrient 和 TTetraCubeFreedomOfMovement 数组传递给 FillPieceOrientationList(),后者又创建了 T 四面体的第六个方向列表 pieceOrientationList[5]。总共有 96 个 T 四面体的排列。下图显示了 Z=-1、Z=0 和 Z=+1 平面中的前 3 个排列

算法深入
现在我们已经涵盖了策略、BitArray 及其可对其执行的操作,并获得了零件方向的排列,是时候将它们整合在一起了。SomaCubeSolver 项目中的 BackTrack(int pieceNdx) 方法是实现这一切的关键。关键数据结构是 public BitArray theCube { get; set; },因为它表示当前正在由七个零件构建的大 Soma Cube。BackTrack(int pieceNdx) 方法通过使用 pieceNdx 为 0 来调用启动。这会以 L 四面体开始大 Soma Cube,如这里所示,位于位置 0、1、3、6。算法运行时,L 四面体保持在此位置,并且零件按以下顺序放置
- L 四面体(在整个运行过程中保持在 0、1、3、6 位置)
- 分支四面体
- 右螺旋四面体
- 左螺旋四面体
- S 四面体
- T 四面体
- L 三面体
然后递归调用 BackTrack(pieceNdx) 方法,其中 pieceIndex 为 1(第二个零件,分支四面体)。当 BackTrack(pieceNdx) 操作分支四面体时,使用 foreach 循环遍历其方向列表
foreach (BitArray ba in pieceOrientationList[pieceNdx])
当 foreach 循环迭代时,theCube 的 DeepCopy 与当前方向“And”运算。如果当前方向不与 L 四面体相交,则 tempCube.IsEmpty() 将为 true(如上面所述),并且当前大 Soma Cube 与分支四面体的当前方向(在 12、15、16、24 位置)“Or”运算以添加分支四面体(粉红色)到大 Soma Cube(如上面所述)。这是上述代码的片段
tempPiece = ba;
tempCube = (BitArray) theCube.DeepCopy();
tempCube.And(tempPiece);
if (tempCube.IsEmpty())
{
theCube.Or(tempPiece);
...
此时,这就是 theCube 的样子,其中包含灰色 L 四面体(在 0、1、3 和 6 位置)和粉色分支四面体(在 12、15、16 和 24 位置)。(我已将相机移动到 theta = 225,phi = -30,R = 12,以便从下方观察大 Soma Cube。)

然后我们递归调用 BackTrack(pieceNdx + 1) 来处理下一个零件,即右螺旋四面体。使用 foreach 循环遍历右螺旋四面体的方向列表,并确定其中一个方向(第七个)的 tempCube.IsEmpty() 为 true,因此右螺旋四面体将放入小立方体 4、7、8 和 17。当前立方体 theCube 与右螺旋四面体的当前方向进行 Or 运算。此时,这就是 theCube 的样子,其中 L 四面体(灰色)、分支四面体(粉色)和右螺旋四面体(黄色)放置在 4、7、8 和 17 位置,如下图所示

然后我们递归调用 BackTrack(pieceNdx + 1) 来处理下一个零件,即左螺旋四面体。在上面的 foreach 循环迭代 17 次后,左螺旋四面体(蓝色)放置在 11、13、14 和 22 位置,大 Soma Cube 开始成型,已有 4 个零件,如下图所示

算法再次递归调用 BackTrack(pieceNdx + 1) 来处理下一个(第五个)零件,即 S 四面体。它最初将 S 四面体放置在 9、10、19 和 20 位置,如下图所示

如果在遍历完整个 foreach 循环后,找不到可行的该零件方向,则 BackTrack() 的当前堆栈帧返回,并使用零件的另一个方向重新开始。当算法递归调用 BackTrack(pieceNdx + 1) 来处理下一个零件 T 四面体时,就会发生这种情况。换句话说,在上图的零件配置中,无法放置 T 四面体(如果您有 Soma 模型,您可能想像上图那样组装它来证明这一点。)S 四面体使用 theCube.AndNot(tempPiece) 移除,如上面所述,BackTrack() 返回,S 四面体被放置在另一个位置,并再次调用 BackTrack(pieceNdx + 1) 来处理下一个零件 T 四面体。最终,在左螺旋四面体处于该位置的情况下找不到解决方案,因此左螺旋四面体被移除,放置在另一个位置,并重复此过程,直到找到解决方案。它经过了近 6,000 次迭代,但找到了一个分支、右螺旋、左螺旋和 S 四面体(第二、第三、第四和第五个零件)的方向,使得 T 四面体(第六个零件)可以放置在 2、4、5、8 位置,如下所示

当 BackTrack() 方法成功放置了所有 7 个零件时,就找到了一个解决方案,这由以下表达式为 true 表示:if (pieceNdx == (NumPieces - 1))。这发生在 L 三面体(第七个也是最后一个零件)放置在 10、18 和 19 位置之后,经过 L 三面体超过 100 次 foreach 循环迭代。
解决方案动画
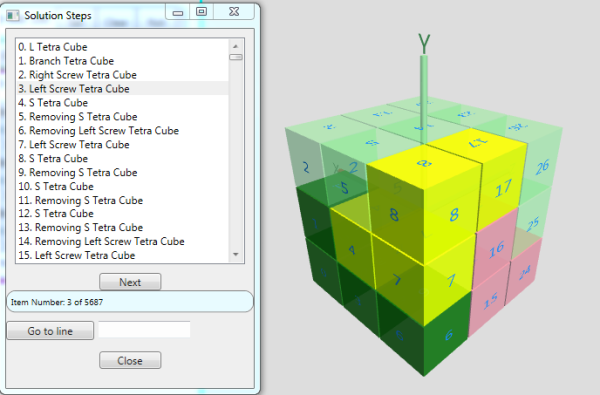
要查看算法的运行情况,SomaCubeWPF2 提供了一项功能,可以逐次迭代,就像使用调试器逐行调试代码一样。在菜单栏上,单击求解以显示解决方案步骤对话框。它读取 SomaCubeSolver 项目生成的由 SolutionFileName 变量(来自 SomaCubeLib)命名的文件,并在列表框中显示迭代。此文件代表 SomaCubeSolver 项目生成的 240 个解决方案中的一个。
当您单击“下一步”按钮时,将显示大 Soma Cube 的状态。最初,列表框中的第一行“0. L Tetra Cube”被选中。当您单击“下一步”时,将放置 L 四面体,位置为 0、1、3 和 6。下图显示,“下一步”按钮已单击三次,大 Soma Cube 现在由 L 四面体(深绿色,第一个放置的零件)、分支四面体(粉色)和右螺旋四面体(黄色)组成。
解决方案步骤对话框中选定的行现在显示“Left Screw Tetra Cube”。再次单击“下一步”按钮将放置该零件。由于此解决方案有近六千次迭代,因此逐步进行所有迭代既不切实际也不具启发性。相反,只需在“转到行”按钮旁边的文本框中键入 5675,然后单击“转到行”按钮。解决方案步骤对话框右下角的进度条将指示进度,因为它会遍历对话框中的每一行以获取大 Soma Cube 的当前状态。(更新进度条的代码使用了 BackgroundWorker 对象,并在我的 WPF Clipping Plane 项目中进行了描述。)第 5675 行 - 显示“5675. T Tetra Cube”的行 - 将被选中,如下图所示。单击“下一步”按钮一次将放置 T 四面体。当您单击“下一步”按钮 10 次时,您可以看到零件被移除和添加,并达到上面所述的状态。单击“下一步”按钮十二次,最后一次,将放置 L 三面体,从而解决大 Soma Cube。您还可以单击所需的行,然后使用“上一步”和“下一步”按钮。MessageReceived() 消息处理程序是在您单击某一行或使用“上一步”、“下一步”或“转到行”按钮时处理来自解决方案步骤对话框的消息的方法。
结论
Kazem Jahanbakhsh 的算法非常巧妙,而且由于它使用了位运算,因此也非常快。WPF 在 3D 图形方面非常出色,我认为该项目充分利用了 WPF 来可视化算法。
历史
- 2019 年 3 月 23 日:1.0.0.0