
使用 OpenGL 进行线性刚体动力学模拟
4.50/5 (2投票s)
在代码中模拟位移、速度和加速度。
引言
要真实地动画3D模型,理解动力学原理至关重要,动力学描述了现实世界中物体的运动。计算物理学已在游戏和模拟工具中变得司空见惯,本文解释了如何将线性动力学与OpenGL渲染相结合。
自牛顿时代以来,科学家和工程师就已理解了动力学定律,程序员也对利用这些原理在3D环境中动画物体越来越感兴趣。如果你在网上搜索,会找到大量相关材料。我特别推荐Chris Hecker的文章以及Andrew Witkin、David Baraff和Michael Kass编写的讲义。
许多资料讨论了动力学背后的理论,有些还展示了如何在代码中实现这些方程。但本文更进一步,展示了如何在基于OpenGL的实际应用中实现刚体动力学。这个应用程序的代码可以在这里获取,它为球体分配了速度和加速度,然后渲染球体在空间中移动的路径。图1展示了这在我的Linux系统上的样子。
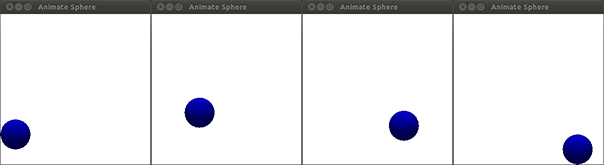
图1:受线性动力学作用的球体运动
这可能看起来不那么令人印象深刻,但代码背后的方法可以扩展到更复杂的情况。但在我讨论代码之前,我需要介绍线性动力学的基础理论。第一节将详细讨论这一点。
注意:本文只关注线性动力学,不讨论旋转动力学。此外,本文只讨论差分方程,不讨论微分方程或积分方程。
1. 线性动力学基础
在许多电子游戏中,物体似乎总是以相同的速度移动。但在现实世界中,物体的速度会随时间变化,尤其是在重力影响下。为了解释其工作原理,本节首先讨论位置和速度,然后讨论加速度和力的重要概念。
1.1 位置和速度
如果你熟悉图形建模,就会知道一个点的位置是作为一组坐标给出的,这些坐标相对于另一个点(称为原点)来确定其位置。在三维欧几里得空间中,坐标以(x, y, z)三元组的形式给出,其中x表示沿x轴与原点的距离,y表示沿y轴与原点的距离,z表示沿z轴与原点的距离。
区分距离和位置很重要。如果一个点的位置r表示为(x, y, z),它与原点的距离|r|等于sqrt(x2 + y2 + z2)。距离标识了一个点有多远,因为它只有一个值,所以称为标量。相反,位置标识了一个点有多远以及它的方向。一个标识大小和方向的量称为向量。
创建动画设计时,仅知道点的位置是不够的。你必须知道它的位置如何从一帧变为下一帧。我们将渲染帧之间的时间间隔称为Δt,以秒为单位。例如,如果应用程序的帧速率是120 fps(每秒帧数),则时间间隔Δt = 1/120 = 0.008333秒。
位置随时间的变化称为速度。如果一个点的位置在时间间隔Δt内变化了(Δx, Δy, Δz),则该间隔内的平均速度表示为(Δx/Δt, Δy/Δt, Δz/Δt)。为了简化表示,我们将平均速度向量表示为v,其分量将给出为vx = Δx/Δt,vy = Δy/Δt,vz = Δz/Δt。
注意:本讨论仅涉及时间间隔内的平均速度,而不是特定时间点的瞬时速度。这对物理学家来说很重要,但对程序员来说则不然。因此,我将停止使用“时间间隔内的平均速度”这一短语。
在物理学中,速度以米/秒表示。也就是说,如果一个点的速度是(5, 5, 0),它的位置每秒在+x方向改变五米,在+y方向改变五米。程序员不常用米,所以我们将速度表示为通用单位/秒。
假设你知道一个点的速度,但不知道它的位置如何从一帧变为下一帧。在这种情况下,以下方程会很有用
![]()
这表明,要找到新位置,将旧位置加上速度和时间间隔的乘积。这应该很容易理解。如果你以64英里/小时(103公里/小时)的速度行驶半小时,你将行驶64 × 0.5 = 32英里或103 × 0.5 = 51.5公里。
图2展示了另一个例子。点的初始位置为y0 = 0.5,它以速度vy = 1向上移动。每个时间间隔为0.75秒,因此第一个更新位置y1 = 0.5 + 1(0.75) = 1.25。第二个位置y2 = 1.25 + 1(0.75) = 2。每个位置都比前一个位置多0.75。
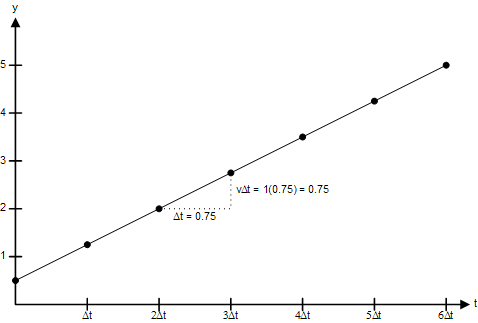
图2:一个点在恒定速度下的轨迹
一个点随时间经过的路径称为它的轨迹,如果速度是恒定的,轨迹将是一条直线。接下来的讨论将探讨当物体的速度随时间变化时会发生什么。
1.2 加速度和力
正如速度衡量位置随时间的变化一样,加速度衡量速度随时间的变化。像位置和速度一样,加速度是一个向量。以下方程显示了它与速度的关系:
![]()
一个重要问题出现了。我们知道如何在给定速度的情况下更新点的位置,也知道如何在给定加速度的情况下更新速度。但是,如何在给定初始速度和加速度的情况下更新点的位置呢?也就是说,如果知道ri、vi和a,如何获得ri+1?
为了得到答案,请记住速度在时间间隔Δt内从vi变为vi+1。该间隔内的平均速度可以如下计算

有了这个表达式,我们可以如下确定更新后的位置

现在让我们看看一个具有恒定加速度的点的轨迹。假设一个点有 r0 = 0.5,v0 = 2 和 a = -1。在第一个时间间隔后,更新后的位置 r1 等于 0.5 + 2(0.75) + (0.5)(-1)(0.75)2 = 1.72。更新后的速度 v1 等于 2 + (-1)(0.75) = 1.25。在第二个时间间隔后,r2 = 1.72 + (1.25)(0.75) + (0.5)(-1)(0.75)2 = 2.375,v2 = 1.25 + (-1)(0.75) = 0.5。
通过跟踪累计时间间隔,我们可以在不计算速度的情况下获得每一步的位置。例如,我们可以通过将方程中的时间间隔设置为2Δt来从r0前进到r2。也就是说,r2 = r0 + v0(2Δt) + (0.5)(a)(2Δt)2 = 2.375。图3显示了该点从Δt到6Δt的轨迹。
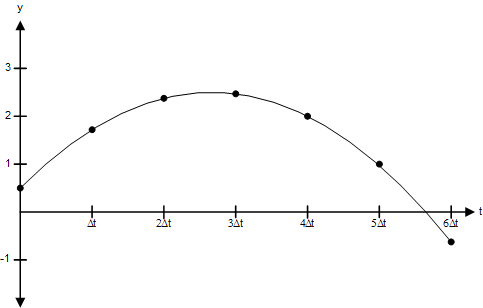
图3:一个点在恒定加速度下的轨迹
如图所示,一个具有初始速度和恒定加速度的点的轨迹是抛物线。这应该很容易理解,因为位置方程是关于时间的二次方程,而二次方程的图形成抛物线。
程序员和工程师通常只关注位置、速度和加速度,而不考虑加速度随时间的变化。这是因为力在物理学中扮演着非常重要的角色——从摩擦力到重力再到电磁力,影响物理运动的现象通常都用力来量化。当力作用于物体并使其移动时,物体的加速度等于力除以物体的质量。用方程表示为 F = ma,其中 F 是牛顿力,m 是千克质量,a 是米/秒2加速度。
至此,你应该对位置、速度和加速度之间的关系有了清晰的理解。这些都以向量形式给出,下一节将展示如何利用它们来约束OpenGL渲染中物体的运动。
2. 线性动力学与OpenGL
现代OpenGL应用程序将顶点位置存储在称为顶点缓冲区对象(VBO)的结构中。随着渲染过程的进行,顶点着色器处理VBO的元素以确定顶点的最终位置。因此,我们将依靠顶点着色器用物理计算的结果来更新VBO数据。
具体来说,本讨论的目标是展示一个OpenGL应用程序,它动画一个球体,使其遵循图1中描绘的轨迹。像图2中的点一样,这个球体具有向上的初始速度但向下的加速度。
要更新球体顶点的位置,必须处理三条信息:经过的时间、速度和加速度。在本节中,我将讨论应用程序如何获取时间,然后继续展示如何计算速度、加速度和更新后的位置。
2.1 获取经过时间
要确定如何更新顶点位置,第一步是获取经过的时间。不同的窗口系统和操作系统提供不同的计时函数,但此示例应用程序中的代码基于OpenGL实用工具包,即GLUT。示例应用程序依赖两个函数来获取计时信息
glutIdleFunc(void (*func)(void))– 标识当应用程序空闲时(未接收或处理事件)要调用的函数glutGet(GLUT_ELAPSED_TIME)– 返回自glutInit调用以来或第一次调用glutGet(GLUT_ELAPSED_TIME)以来经过的毫秒数
要在代码中配置计时,animate_sphere.cpp文件中的主函数调用以下代码行:
glutIdleFunc(update_vertices); start_time = glutGet(GLUT_ELAPSED_TIME);
第一行表示当应用程序空闲时应调用update_vertices函数。第二行计算start_time,它设置了以毫秒为单位的起始时间。
update_vertices函数获取当前时间并用它来计算经过的时间。以下代码展示了其工作原理
void update_vertices() {
current_time = glutGet(GLUT_ELAPSED_TIME);
delta_t = (current_time - start_time)/1000.0f;
...
} delta_t变量包含将用于我们物理方程的经过时间。请注意,这不是帧之间的时间,而是自应用程序启动以来经过的总时间。
2.2 处理速度和加速度
在确定计时数据之后,应用程序会计算由图形的速度和加速度引起的位置变化。在animate_sphere.cpp中,动态参数使用以下代码进行初始化:
#define INIT_POSITION 0.5f #define INIT_VELOCITY 0.8f #define ACCELERATION -0.4f ... glm::vec3 init_position = glm::vec3(0.0f, INIT_POSITION, 0.0f); glm::vec3 init_velocity = glm::vec3(INIT_VELOCITY, INIT_VELOCITY, 0.0f); glm::vec3 acceleration = glm::vec3(0.0f, ACCELERATION, 0.0f);
如图所示,r0被初始化为(0.0, 0.5, 0.0),v0被初始化为(0.8, 0.8, 0.0),a被设置为(0.0, -0.4, 0.0)。每个都由OpenGL数学库提供的glm::vec3数据类型表示。
update_vertices函数使用以下代码计算更新后的位置向量
delta_r = init_position + delta_t * init_velocity + 0.5f * delta_t * delta_t * acceleration;
这与我们之前推导的方程相同,应该很熟悉。结果标识了每个顶点位置应如何更新,它至少可以通过两种方式使用。首先,可以将delta_r添加到包含顶点位置的VBO元素中。其次,可以将delta_r作为统一变量发送到顶点着色器,顶点着色器将把delta_r添加到每个顶点的最终位置。在OpenGL中,统一变量是不会从一个顶点到另一个顶点变化的量。
animate_sphere应用程序采用了第二种方法,以下代码将统一变量的数据设置为等于delta_r
glUniform3fv(delta_location, 1, &(delta_r[0]));
当顶点着色器执行时,它会将更新后的位置添加到图形中的每个顶点。你可以通过检查顶点着色器(animate_sphere.vert)来看到这一点,其中包含以下代码行
gl_Position = mvp * vec4(in_coords + delta, 1.0);
这表明顶点的位置被设置为原始VBO位置(in_coords)加上更新后的位置(delta)通过模型视图投影矩阵(mvp)变换后的结果。当着色器执行时,它会更新顶点位置,结果如前面图1所示。
3. 结论
如果你希望图形模型中的对象逼真移动,你需要对动力学有基本的了解。本文讨论了刚体线性动力学理论,并重点关注了位置、速度和加速度之间的关系。本文的第二部分讨论了如何将该理论在代码中实现。特别是,animate_sphere应用程序设置了球体的初始速度和加速度,用C语言计算了动态方程,并使用OpenGL渲染了它在空间中的运动。