
二阶 Goertzel 和 Reinsch 算法
Gerald Goertzel 开发了一种非常快速的离散傅里叶变换方法。但似乎很少有描述能真正完整地解释其推导过程。
二阶 Görtzel 算法
网上有很多关于二阶 Goertzel 算法的描述。但大多数都没有完整解释其推导过程。总是有相同的部分缺失。所以我试着填补这个空白。 :)
二阶 Goertzel 算法基于一阶 Goertzel 算法的传递函数

用
![]()
将分子和分母乘以 1 + a1 * z^-1 的共轭,使分母变为实数,得到

由此得到差分方程
c[n] + a1 * c[n-1] + c[n-2] = y[n] + b1 * y[n-1]
用
a1 = -2 cos(2kp/N) and b1 = -exp(-j2kp/N)
很长一段时间,我一直在想他们为什么要这样做。差分方程现在看起来复杂得多。但最终还是有一些好处。 :)
在这里,所有的解释现在都说:“既然我们只关心 c[n],我们可以将复数乘法 b1 * y[n-1] 留到计算最后,并且只在最后执行一次”……这并不完全是事实。我们关心 c[n],而复数计算可以放在最后。但这两者之间没有联系。我深入研究了数字信号处理的理论才找出原因。 :)
关键在于信号路径。差分方程的信号路径如下所示

如果我们要实现这一点,它将是这样的...
c[n] = y[n] + b1 * y[n-1] - a1 * c[n-1] - c[n-2]
...放入一个循环,在每个周期中,都要进行复数乘法 b1 * x[n-1],因此,整个计算都必须以复数形式进行。比一阶 Goertzel 算法所需的计算量大得多。这并非我们想要的。
信号路径可以绘制成这样

现在,我们有了两个独立的传递函数,并且这两个函数可以互相切换而不影响最终的传递函数。
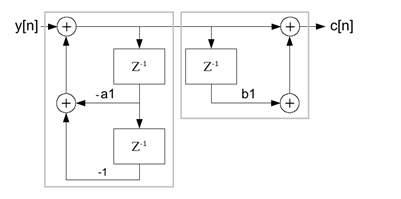
然后重新组合。这种形式称为信号路径的直接形式 II,看起来好得多。反馈部分现在位于函数开头。

将其转化为代码,得到
v[n] = y[n] –a1 * v[n-1] – v[n-2]
对于左侧的反馈部分,
和
c[n] = v[n] + b1 * v[n-1]
对于右侧的前馈部分。
这就是最大的好处。相当复杂的差分方程,只需更改信号路径的绘制方式,就能得到一个非常简短且快速的算法。数学和纯粹的数字信号处理理论的令人印象深刻的交互(而完成这一切的人,Gerald Goertzel,确实令人钦佩?)
反馈部分必须在一个遍历 y 的所有样本的循环中实现。这意味着从 0 到 N-1。
for (n = 0; n < N; n++)
{
v0.real = y[n].real - a1.real * v1.real - v2.real;
v2 = v1;
v1 = v0;
}
我使用了复数数据类型,因为最终我们得到的是复数。
右侧部分只需要在计算结束时计算一次(这与我们只查找 c[n] 无关?)。基本上,右侧部分包含复数乘法 v[n-1] * b1。到目前为止,我们只处理了实数值。这意味着 v[n-1] 是实数,没有虚部。因此,接下来的复数乘法并不复杂。实部变为 v[n-1].real * b1.real,虚部变为 v[n-1].real * b1.imag。最后,我们寻找傅里叶分量 a[n] = c[n].real*2 和 b[n] = -c[n].imag*2。这两个值都应该计算为 c[n] = v[n] + b1 * v[n-1]。现在对于实部,它是
c[k].real = (v0.real + b1.real * v2.real);
由于 v[n] 是实数值且没有虚部。虚部 c[k].imag 的计算变得稍短
c[k].imag = -(b1.imag * v1.real);
最后,由于以下原因,这两个值都必须除以 N
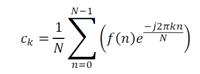
有了这个,所有傅里叶分量 a[0] 到 a[N-1] 和 b[0] 到 b[N-1] 的序列是
for (k = 0; k < N; k++)
{
v0.real = 0;
v0.imag = 0;
v1.real = y[1].real;
v1.imag = y[1].imag;
v2.real = y[0].real;
v2.imag = y[0].imag;
b1.real = -Math.Cos((double)(2.0 * Math.PI * (double)(k) / (double)(N)));
b1.imag = Math.Sin((double)(2.0 * Math.PI * (double)(k) / (double)(N)));
a1.real = -2 * Math.Cos((double)(2.0 * Math.PI * (double)(k) / (double)(N)));
a1.imag = 0;
for (n = 0; n < N; n++)
{
v0.real = y[n].real - a1.real * v1.real - v2.real;
v2 = v1;
v1 = v0;
}
c[k].real = (v0.real + b1.real * v2.real) / (double)(N) * 2.0;
c[k].imag = -(b1.imag * v1.real) / (double)(N) * 2.0;
}
And at the end it takes
c[0].real = c[0].real / 2;
c[0].imag = c[0].imag / 2;
这样实现的话,二阶 Goertzel 算法就是一种非常快速的离散傅里叶变换方法。在我的电脑上,具有 1000 个样本的测试应用程序耗时 8 毫秒。标准的离散傅里叶变换实现需要 120 毫秒才能完成相同的计算。但计算速度的提高是以牺牲一些精度为代价的,而且当样本数量过大时,Goertzel 算法不稳定。即使在我的测试应用程序中,也已经可以看到一些不精确。对于矩形信号,所有实部都应该为 0。但 a[1] = -0.12,a[2] = 0.04,a[3] = -0.11,依此类推。在标准实现中,a[1] = 0.04,a[2] = 0.04,a[3] = 0.04,这是谐波的相位偏移,可能造成很大的差异。
关于稳定性,我读到 Reinsch 算法是二阶 Görtzel 算法的改进版本,并且是稳定的。所以,我也实现了它进行比较。
Reinsch 算法
Reinsch 算法是 Görtzel 算法的修改版。
对于 cos(2Pi*k/N) > 0,Reinsch 取部分
v[n] = y[n] - a1 * v[n-1] - v[n-2]
并说对于 v[n] – v[n-1] 之间的差值
v[n] - v[n-1] = y[n] - a1 * v[n-1] - v[n-2] - v[n-1]
他对这个方程进行 +2 * v[n-1] 和 – 2 * v[n-1] 的扩展,由于 a1 = -2cos(2Pi*k/N),他得到
v[n] - v[n-1] = y[n] + (2cos(2Pi*k/N) - 2) * v[n-1] + v[n-1] - v[n-2]
现在有两个替换
(2cos(2Pi*k/N) - 2) = - 4 * sin(Pi*k/N)^2
令 v[n] – v[n-1] = dv[n],最后的两项 v[n-1] – v[n-2] = dv[n-1],
我们将得到:
dv[n] = y[n] - 4 * sin(Pi*k/N)^2* v[n-1] + dv[n-1]
最后得到 v[n]
v[n] = dv[n] + v[n-1]
这是一个带有 dv[n] 作为反馈部分的循环,看起来像这样
a1.real = - 4 * Math.Pow(Math.Sin((double)(Math.PI * (double)(k) / (double)(N))), 2.0);
a1.imag = 0;
we[k] = a1.real;
for (n = 0; n < N; n++)
{
dW = y[n].real + a1.real * v1.real + dW;
v0.real = dW + v1.real;
v1 = v0;
}
c[k].real = (dW - a1.real / 2.0 * v0.real) / (double)(N) * 2.0;
c[k].imag = (b1.imag * v1.real) / (double)(N) * 2.0;
对于 cos(2Pi*k/N) >= 0,Reinsch 取和而不是差值
v[n] + v[n-1] = y[n] - a1 * v[n-1] - v[n-2] + v[n-1]
得到
(2cos(2Pi*k/N) + 2) = 4 * cos(Pi*k/N)^2
和
v[n] = dv[n] - v[n-1]
这就是像
a1.real = 4 * Math.Pow(Math.Cos((double)(Math.PI * (double)(k) / (double)(N))), 2.0);
a1.imag = 0;
we[k] = a1.real;
for (n = 0; n < N; n++)
{
dW = y[n].real + a1.real * v1.real - dW;
v0.real = dW - v1.real;
v1 = v0;
}
c[k].real = (dW - a1.real / 2.0 * v0.real) / (double)(N) * 2.0;
c[k].imag = (b1.imag * v1.real) / (double)(N) * 2.0;
所以我可以比较这两种算法,结果有点令人失望。
Görtzel 算法的不稳定性是由早期浮点数运算中的数字消隐引起的。如果整个算法都用精度为小数点后 7 位的 float 变量实现,就可能发生这种情况。以这种方式实现,有超过 28000 个样本时,k = 1 的 cos(2Pi*k/N) 变为 1.0。但现在使用双精度值,这种情况就不会再发生。因此,只要 DFT 是在现代 64 位计算机上执行,并且是用 C# 这样的现代语言实现的,这两种算法在多达 100000 个样本时仍然表现相同。这意味着,只要是这样,Reinsch 算法就没有必要了 :-)
二阶 Goertzel 算法是一个非常快速的方法,但它也有其缺点。关于精度,Reinsch 算法也存在同样的问题。我通过将所有使用的 exp(j2k /N) 值的计算放入一个数组并从中提取,对离散傅里叶变换进行了一个稍快的实现。使用该算法,相同的变换运行时间为 20 ms,并且精度与标准实现相同。见
这可能是一个不错的选择。 :-)
然而,二阶 Görtzel 和 Reinsch 算法都是非常复杂的算法,并且都需要大量的数学和计算机科学工作。