
让我们来构建一个机器人!
4.90/5 (102投票s)
你是开发者吗?……那么你就可以建造一个机器人……
引言
过去几年里,只有那些最与世隔绝、在沙漠中游荡的技术恐惧症患者才未能注意到我们周围惊人技术突飞猛进的发展。这不仅限于电子和数字领域,而是几乎你所关注的每一个领域……例如,医学、物理学、重工业。这就像摩尔定律无处不在地发挥作用!
创新的速度似乎与日俱增,而且关键是,以前只有拥有真正专业知识的人才能掌握的技术,现在已触手可及,甚至连谦逊的普通开发者(比如我,如果你正在阅读这篇专栏,可能也包括你!)也能掌握。我已经玩了一段时间物联网(IoT)技术,而且我想大多数人一样,并没有真正超越“它只是一个玩具/有点乐趣”的阶段……我的意思是——太棒了,我们收到了新的树莓派或英特尔主板,我们都很兴奋,然后我们制造……嗯,和大多数人一样……一个媒体中心或类似的东西。然后我们的物联网冒险就结束了……是吗?……我是一名工程师,我在互联网规模上创建和构建事物,我有一个心痒难耐的想法,而且我对我的媒体中心感到厌倦。所以最近我做了当我感到厌倦时自然而然会做的事情……我订购了更多的东西:)
请注意,本文是机器人建造冒险的起点——它不是一个成品项目。然而,我相信这里提供了足够的概念信息,如果你有时间的话,可以让你在早上就开始建造!随着项目的进展,我将再撰写一两篇文章,提供具体的指导,让你加入我的机器人大军:P
构思
我最近收到各种电子部件,以便我能基于树莓派建造一辆玩具车/汽车/随便什么(它有轮子,会动!),这已经足够酷,而且相当可行。我还打算加一个摄像头,让它把图像传输到手机或类似设备上……为什么呢?……嗯,我最初有一个很棒的概念,就是让这个自主的家伙在花园里四处游荡,追逐家里的鸡,找出它们在哪里下的蛋……
如果你有鸡,或者认识有鸡的人,你就会意识到,当家里所有的鸡(我们家有六只)在下蛋时间擅自离去,而你却连续四天找不到它们下蛋的地方时,这是一个大问题。相信我,那可是很多鸡蛋要吃啊!无论如何——让我们暂时搁置这个想法。
我们都看到过各种家用和工业/商用机器人上市。它们通常预算庞大,价格昂贵,大多数人经济上难以承受,或者功能有限,几乎毫无用处。有趣,甚至引人入胜,但相当无用。今年(2016年)5月底,华硕推出了其首款家用机器人,我当时想——哇,它很可爱,而且实际上,建造起来并不那么困难……当然,我们可能在家里建造的东西可能不像华硕销售的酷炫产品那么精致或时尚,但它肯定可以拥有类似的功能,甚至更多!

所以——可爱的小家伙,是吧?……它没有手臂或任何能做实际事情的方式——它(他/她/它?)可以四处移动,并用它的头部与你互动……好吧,但这并不是一个头部——它是一个平板式屏幕、麦克风和摄像头的组合。华硕为他们的机器人制作的广告相当令人尴尬,但看完它确实能很好地了解设备的功能和特性。从看那个广告和阅读一些资料来看,我的理解是它可以做以下事情:
- 在你家四处移动(自主地)
- 避开障碍物
- 使用其内置摄像头“看”,并识别某些物体
- 使用其“声音”(内置扬声器)与你“沟通”
- 使用其“耳朵”(内置麦克风)“听”你和你的“命令”
- 用它的脸(内置平板/屏幕)向你“展示”事物
显然,如果我们拥有上述基本功能,并辅以一些车载和基于云的技术,那么这个可爱的小机器人就能开始变得非常有用。那么,我们这些谦卑的开发者,也许以开发网站或企业级应用为生,如何才能甚至 *开始* 涉足疯狂的机器人和电子世界呢?……它看起来可能很可怕,但实际上并非如此……让我们开始看看如何实现它……<

分解到基础
我认为大多数开发者都能够组装自己的电脑,这样说应该是安全的。我的意思是,现在这就像点击一样简单……只不过更像是“推入”(插槽)然后(等待)“咔嗒”一声……拿到主板,装上CPU,插入内存条,连接主板到硬盘和电源的线缆,你就差不多准备好了。一旦安装了操作系统,作为开发者,我们就会花时间使用各种API,构建在电脑上运行的应用程序。嗯,你猜怎么着——处理电子设备和组装东西并没有那么大的不同……所以,让我们来看看事情是如何运作的,假设我们实际上只是(某种程度上)在组装一台PC!(但它实际上是一个机器人,嘘!)
1 - 主板
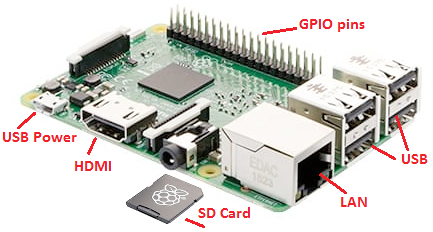
既然我们来自在操作系统之上开发软件的世界,那么在物联网(Internet of Things)世界中最简单、最有用的套件之一就是神奇的树莓派(R-PI)。这种自给自足的迷你电脑可以运行不同版本的Linux,而且令人惊奇的是,还可以运行一个名为Windows IoT Core的Windows 10版本。你甚至可以在微软商店购买树莓派——非常酷。树莓派主板通过多个USB插槽之一供电。除了电源插槽,还有其他插槽可以用于连接USB设备,如网络摄像头、WiFi dongle、键盘、存储、传感器——只要是USB设备,都应该可以连接。在下面的图片中,你可以看到一个树莓派设备及其USB端口。后部(图片右侧)有四个标准尺寸的端口,如果你看图片左下角,你会看到小的USB电源端口。迷你USB端口旁边是HDMI端口——我们可以用它来驱动显示器。
2 - GPIO - 与设备通信的网关
除了用于与设备通信的 USB 插槽外,R-PI 还有所谓的“GPIO”引脚。如果你看上面的图片,在板的顶部/背面,有一排金属尖刺伸向空中。这些就是“GPIO”引脚。它们实际上是金属引脚,固定在塑料块中,下面连接到主板。我已经提过几次“GPIO”这几个字母——它代表“通用输入输出”(General Purpose Input Output)。如果你愿意,这些引脚就是你的主板上的计算机代码与你决定连接到主板外部世界的设备之间的网关。简单地说,就像你可以设置一些 CSS 来让一个 DIV 显示隐藏(例如:设置 style display:none)一样,你也可以向一个引脚发送信号,说“打开或关闭某个东西……”,或者“与 X 设备/组件/传感器通信并向/从其发送/接收指令/信息”。
为了使其真实——这里有一些我们可以在运行W10-IOT的树莓派上运行的C#代码——它只是简单地打开和关闭连接到GPIO端口的LED,使其闪烁。
打开LED - pin.Write(GpioPinValue.Low);
关闭LED - pin.Write(GpioPinValue.High);
这里有一个小的视觉效果来演示

它真的就是这么简单……当然,你猜怎么着,需要学习一个API,但你每次使用新库或网络服务时都会这样做——这没什么大不了的。(我们会在另一篇文章中讨论电阻器之类的其他杂乱东西)。所以,如果我们知道使用API,我们可以编写一些简单的代码,它通过GPIO或USB发送信号,并可以控制外部的某些东西,那么我们就可以跳跃性地想到,我们可以使用我们的代码,例如,告诉连接到主板(通过GPIO)的小电机启动和停止,从而让我们的机器人四处移动……突然间,制造一个机器人似乎相当可行!
3 - 从外部世界收集数据
既然我们现在理解了GPIO可以向连接的设备(如我们的LED或步进电机)发送指令,那么我们也可以从连接的设备获取信息,这就不难理解了——这正是“传感器”发挥作用的地方。
这个词本身就说明了一切——传感器让我们能够感知世界的信息。我们已经通过智能手机了解了传感器……触摸屏是一种传感器,GPS是一种传感器,加速度计也是一种传感器。所有这些都能检测、测量并报告外部世界的信息。我有一本关于传感器的很棒的入门书,名为《制作:传感器:使用Arduino和树莓派监测真实世界的实践入门》。它非常值得一读。虽然还有很多其他领域,但这本书描述了一些传感器可以涵盖的领域:
- Distance
- 烟雾和气体
- 触摸
- 移动
- 光线
- 加速度和角动量
- 身份
- 电力
- 声音
- 天气和气候
出门购买传感器很容易,但停下来思考一下它们,并了解它们的基本工作原理也是很好的——这将帮助你决定哪种最适合你的特定应用。例如,我们来看两个。
加速度计
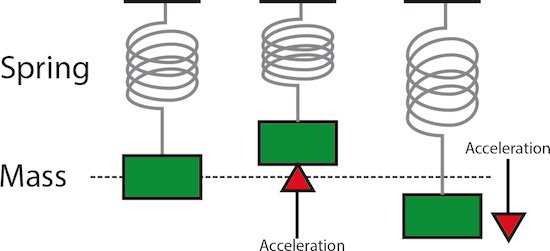
(参考:arcbotics)
加速度计是一个非常简单的概念。我们有一个中心质量,它通过某种方式连接或悬挂在“零点”上。当质量移动时(例如,你摇动手机),质量相对于其零点的位置就会改变。发生这种情况时,我们可以记录新的位置和变化率,简单地结合起来,这给我们提供了加速度率。
压力
有许多不同类型的压力传感器——最基本的是,我们有两个可以接触并建立连接的物体,但它们被某种东西隔开。在这个例子中,我们有两块金属,用一小块橡胶隔开。在默认状态下,两块金属之间没有连接,因此默认状态为OFF。

当压力施加到设备顶部时,橡胶弯曲,允许两块金属连接,从而形成电路。现在,两块金属之间的连接已建立,电路状态为ON。

(参考:我和ms-paint!)
示例传感器
这里要传达的信息是,要思考你想要实现什么,然后寻找有哪些传感器可以帮助你。有些传感器比其他传感器工作得更好,而且工作方式也不同,所以请研究你的选择。这个传感器示例列表能让你很好地了解你可以获得什么——而且它只是冰山一角的尖尖!
为了玩玩,只需在网上搜索“传感器套件”,你就会找到很多例子。浏览下面所示的传感器列表,你会很快看到许多在机器人项目中会有帮助的传感器,例如声音、运动、火焰、敲击、振动、气体、温度和光电管传感器都可以在我自己的机器人项目中使用(这个物联网业务真是令人兴奋!)。

(参考:传感器图片)
将外部引入内部……
我认为在现阶段快速了解我们如何从传感器获取数据会很有帮助。我们之前已经看到过如何通过告诉LED打开或关闭来向传感器/设备/组件发送指令。从开发角度来看,我们习惯了这种操作——发出指令,让事情发生。从传感器获取数据的方式也遵循我们熟悉的模式,要么通过函数,要么通过回调/事件。代码的实际实现显然取决于你使用的传感器设备以及连接到设备的库。这里有一个小的连接温度传感器的示例。在这种情况下,传感器被识别为系统设备,代码打开与设备的连接,读取设备所说的一切(关于温度),然后关闭连接。
#!/usr/bin/env python
import os
import glob
import time
# load the kernel modules needed to handle the sensor
os.system('modprobe w1-gpio')
os.system('modprobe w1-therm')
# find the path of a sensor directory that starts with 28
devicelist = glob.glob('/sys/bus/w1/devices/28*')
# append the device file name to get the absolute path of the sensor
devicefile = devicelist[0] + '/w1_slave'
# open the file representing the sensor.
fileobj = open(devicefile,'r')
lines = fileobj.readlines()
fileobj.close()
# print the lines read from the sensor apart from the extra \n chars
print lines[0][:-1]
print lines[1][:-1]
(代码参考:http://raspberrywebserver.com/gpio/connecting-a-temperature-sensor-to-gpio.html)
在生产环境中,您可能会将其封装在一个返回单个值的“GetTemperature”方法中。
4 - 半自主家用机器人
到目前为止,我们已经探讨了我们想要做什么,并且看到通过利用我们现有的开发者技能并按逻辑步骤构建事物,从“有趣的概念……”到“哇,这可能……”是合理的。至少对我来说,这令人兴奋,但这只是难题的一部分。实际上,我们只看了最初的“餐巾纸背面”设计。在进一步进行之前,我们应该考虑将所有这些组件和传感器粘到一个盒子上并称之为“机器人”之后会发生什么。
我们已经确定,通过将像树莓派/Arduino/伽利略等开发板连接到外部设备和传感器,我们可以弄清楚它如何移动、感知事物以及轻松地从A点移动到B点。然而,我们还没有真正研究过使它不仅仅是一个简单的“廉价媒体中心”项目移动等价物的部分。在某些方面,我们希望对机器人进行处理以赋予其“智能”(我用这个词非常非常轻描淡写!)是简单的,而在其他方面,则相当复杂。它将涉及图像识别、连接到基于网络的服务、环境感知/分析和语音识别等。我说机器人将是半自主的,因为它将设法做一些事情并自己解决,但对于其他事情,它将不得不依赖于Cortana等在线服务的支持。目标是最大限度地发挥我们在“地面”上可以做的事情,并通过云支持来弥补设备本身无法做到的事情。
购物清单
既然我们现在对构建机器人所需的概念有了很好的理解,那么让我们来看看我们需要汇集哪些具体的东西来实现它。我将通过审视我之前提出的逆向工程规范要求来着手。请记住,我将以华硕的Zenbo机器人所呈现的总体概念为基础来构建这个机器人。
主板
我将使用树莓派作为我机器人的核心部分。你也可以选择这个,或者选择其他供应商(如英特尔)提供的同样强大的产品。我选择树莓派的唯一原因是我家里有几个闲置的,所以它们也应该得到利用。树莓派也广为人知,并且受到Windows IoT的支持,因此我可以使用该平台以及默认运行在树莓派上的定制版Linux来尝试各种功能。
机身
首先,我将把机器人组装在我现有的底盘上。根据事情的进展,我可能很快就需要更改它以适应不同的传感器等。我希望机器人既美观又好看,但这是我第一次做这个,所以我的目标是先实现功能,然后再回来看看我需要做些什么才能为它装上一个时尚的外壳。当然,下次我可能会反过来做(是的,机器人大军来了!),或者我可能会考虑使用3D打印机来定制一个符合我需求的外壳解决方案。
移动
机器人运动有几个方面。
- 四处移动……我们需要一些东西来运输机器人本身并使其移动。我可以考虑不同的选择,包括履带、两轮带尾撑,或三/四(或更多)轮。由于我希望机器人拥有最大的灵活性,我将选择四轮选项,并做一些不同的事情。我偶然发现了一个名为“piborg”的小型控制器板——它专门设计用于独立控制各个伺服电机(移动轮子的小电机)的繁重工作。这在尝试对伺服电机运动进行高级控制时既有用又重要。从观看“Zeroborg”的视频中,我了解到了“麦克纳姆轮”——这种轮子设计允许向任何方向移动,甚至侧向移动!……观看此视频,了解Zeroborg侧向移动,你就会明白——它非常酷。我选择的移动部件将是PiBorg控制器,安装在树莓派之上,该控制器将连接到四个独立的伺服电机,控制巧妙的侧向移动麦克纳姆轮。一开始就将所有这些组合起来可能有些雄心勃勃,所以我可能会从标准的双轮和尾撑系统开始,但最终,Zeroborg视频中展示的灵活性是我想要实现的。即使是最好的计划也从未在第一次尝试中幸存下来,所以我们拭目以待吧!

图片参考:http://www.robotshop.com/en/3wd-48mm-omni-wheel-mobile-robot-kit.html
http://robu.in/product/a-set-of-100mm-aluminium-mecanum-wheels-basic-bush-type-rollers-4-pieces/
- 移动头部……让机器人看起来更亲近的微小细节之一是它的“头部”能够移动或倾斜——这个简单的动作似乎能让我们与它产生某种情感连接。即使不增加运动,仅仅在屏幕上显示一个卡通化的、富有表现力的、简单的线条图也能为机器人增添“个性”。

(参考:Baxter)
在这个领域已经做了很多研究,我们似乎“觉得人类的卡通式模仿很迷人”。然而,如果你在让机器人看起来像人类方面走得太远,那么与这些机器人互动的人类会感到不安。看看这个关于恐怖谷的视频,了解更多有趣的内容。
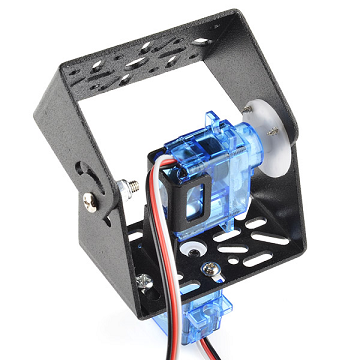
为了让头部移动,我打算将其安装在一个可由“云台”伺服机构控制的固定装置上。例如,您在闭路电视摄像机上见过这些。它允许您控制上下左右四个轴。这款Sparkfun 的云台伺服支架清楚地演示了这一概念。支架可以旋转,旋转方向由两个伺服电机之一处理,它们可以单独或协同工作,以实现流畅的运动效果。
环顾四周/环境感知
视觉/图像检测
除了四处移动,我们还需要能够环顾四周。我们可以使用标准组件摄像头、网络摄像头或类似设备来实现这一点。对于这个机器人,我希望它比遥控汽车更智能,我希望它能够识别事物,并智能地互动。这是否要求过高?……不,事实并非如此。例如,使用连接到我们摄像头的OpenCV图像识别库,我们就能实现奇迹。有一篇很棒的指导文章描述了如何使用OpenCV 和云台摄像头进行人脸追踪。还有一篇演示了如何使用 OpenCV 和树莓派进行人脸识别/匹配。最后,Sergio Rojas 在他的文章中展示了如何使用OpenCV 的 .NET 封装在实时环境中将姓名映射到人脸。

人脸识别和辨识对我们的机器人之所以重要,是因为它能让机器人识别家庭成员并给予他们个性化关注。我们还可以通过人脸识别从面部表情中识别情绪——这对于家用辅助机器人也非常有用。当然,这不仅仅关乎机器人生活中的人类,也关乎它所处的环境。OpenCV 和其他库在检测(并帮助避免)障碍物以及识别物体方面也极其有用。
在结束图像识别之前,我还想提一下我正在考虑在项目中使用的另一个板子,即OpenMV板。这个专门的板子致力于用Python进行机器视觉。引用他们的网页,“有了OpenMV Cam,机器视觉中困难且耗时的工作已经为你完成——留下了更多时间用于创造力”。我认为这绝对值得研究。

导航、障碍物检测、通用感知
导航可以通过预先绘制区域图、固定机器人可以导航的信标来实现,或者让机器人自行探索环境。后者是一个非常有趣的领域,这篇关于使用树莓派进行机器人制图的文章很好地洞察了它的工作原理。
最有可能的是,我将从第一种方法开始,然后随着我让机器人越来越自主,逐渐转向第二种和第三种方法。无论我使用哪种方法,我都需要添加一些有助于导航的传感器——这里有一些我将考虑的传感器:
检测:我们可以在软件中使用图像识别和物体检测,但有时这可以而且需要由更专业的传感器辅助。例如,值得考虑的是运动检测器和避障功能。

家居安全:在一般意识方面,我有点担心房屋火灾、煤气泄漏等。因此,最好在机器人中加入一些安全方面的东西。我将安装一个气体传感器和一些处理热量/火焰的设备。当*有人*忘记关浴缸时进行洪水检测也是一个好主意。

沟通
到目前为止,我们已经有了一个相当不错的技术购物清单,我们可以将这些技术整合起来,让机器人四处移动并从其环境中获取大量输入。我们尚未触及的是它如何与它的人类霸主<<邪恶的笑声!>>进行交流。交流是一个双向过程——我们需要输入,也需要能够给出输出。我们已经通过一些传感器和图像识别库等技术覆盖了部分输入,但我们尚未关注的明显输入是语音。我将从两个方面着手解决这个问题。首先,我可以在机器人上离线、车载地做什么,其次,什么需要交给基于云的智能支持服务,例如Microsoft Cortana。为了捕捉输入,我将首先使用我将使用的网络摄像头内置麦克风——根据结果,我可能需要或不需要使用独立的麦克风。一个小扬声器也会很有用,屏幕也是如此。树莓派有两个官方摄像头,一个用于正常光线,另一个用于红外线——在光线不足时,这可能值得考虑。另一点要提的是——这里有很多事情要做,扬声器、摄像头、屏幕、外部板——我可能需要从标准树莓派升级到“计算模块开发套件”。这是一个为更重度实验设计的原型套件。它额外拥有120个GPIO引脚、一个HDMI端口、一个USB端口、两个摄像头端口和两个显示端口,提供了比核心系统本身更大的灵活性。
我可以使用的屏幕选项有很多种,从非常基本的屏幕到高分辨率触摸屏。官方的树莓派7英寸触摸屏显示器看起来很有趣,因为它直接与树莓派本身集成,并且不需要单独的电源。这个屏幕将主要用于三个方面。首先,它将是机器人的“情感面孔”,在与人交流时显示一些漂亮的动画面部表情。其次,它将是显示信息的区域(例如,一个漂亮的图形显示天气,或者一个网页浏览器显示美味蛋糕的食谱!)。最后,它将作为输入设备,允许用户在自然语言/语音控制不起作用或不适合当前任务时,使用触摸屏与机器人交流。

扬声器也类似——我可能会发现便宜的USB类型扬声器效果不错,或者我可能会购买可以在被动模式下工作的扬声器,可能带一个增强器,直接连接到树莓派的音频插孔。RaspberryPI-Spy 有一篇短文,包含 Python 代码,用于测试通过连接到树莓派音频插孔的简单廉价扬声器的声音输出。
网络连接已经搞定了——最新的树莓派型号已经内置了许多连接功能,所以无需担心需要任何额外的东西。以下是树莓派版本3标准提供的功能。
- 802.11n 无线局域网
- 蓝牙 4.1
- 低功耗蓝牙 (BLE)
一旦我完成基本功能,我将研究的一件事是利用从机器人收集的数据。我设想使用Azure IoT 套件来协助我。
为了结束通信部分,让我向大家介绍一个非常酷的开源语音控制库,叫做Jasper——它将是我识别用户给定命令并回传信息的起点。Jasper 在树莓派平台上运行得非常好。它可以在离线状态下执行一些基本操作,拥有丰富的 API,并且还可以与在线语音引擎(例如Google提供的引擎)集成。Jasper 是一个执行两项任务的框架。它利用各种钩子将语音转换为文本,并以相反的方式执行相同操作(文本转换为语音)。Jasper 有两个主要功能,称为“Modules”。第一个是标准模块。它负责与用户的积极交互。在标准模块(模式听起来更好?!)中,用户发起与 Jasper 的联系并要求它做某事。Jasper 截取语音,将其翻译,并执行请求的操作。第二个模块是通知。它的功能是监听/静默监控信息流(例如 Twitter 动态或电子邮件帐户),并在有需要报告的内容时(假设你告诉它在收到 Twitter 私信时通知你!)向用户说话。我对 Jasper 已经进行了一些初步调查,并非常期待将其作为我机器人项目的基石。要全面了解从物联网/家庭自动化角度使用此库,请花几分钟时间查看Lloyd Bayley 关于 Jasper 的 YouTube 视频报告。Lloyd 使用 Jasper 与他的家庭气象站通信,报时,开关灯——这真的很有启发性,值得你花几分钟时间!
在我们结束购物清单之前,让我们看看所有东西可能如何组合(感谢华硕提供的灵感!)

规格
好的——我们已经弄清楚了各个部件如何协同工作以及我们想要利用的技术——那么我们来考虑一下我们真正的机器人朋友要在家里做些什么吧!
这是一份我整理的入门清单——我相信当我开始建造并发现不同事物的优缺点时,这份清单会不断演变并拥有自己的生命。
- 远程“签到”
- 当我不在家时,可以使用移动应用程序或网页“签到”机器人,并要求它在房屋周围转一圈,检查一切是否正常。例如——我今天早上有一个商务会议,出门前熨了一件衬衫——我拔掉熨斗了吗?……机器人可以被指示到适当的位置,给我一个摄像机镜头,让我知道。
- 也许我出去了一个小时但耽搁了,想检查一下家里的狗是否还好——我可以派机器人去找菲多,检查它有没有吃我最喜欢的鞋子!
- 你有没有把孩子们留在家里,列出一份家务清单?……让机器人检查他们*确实清空了洗碗机*,并且在外面呼吸新鲜空气,而不是在电视机前“发呆”。
- 远程“警告/警报”
- 您还记得我想安装家庭安全传感器。如果机器人感应到气体或温度突然升高(火灾?),它们可以联系我并提供带视频的实时更新。
- 那如果是不速之客,比如一个切断了警报系统电缆的窃贼呢?……机器人可以拍摄他们并向您和当局实时传输警报(当然是通过移动GPRS,因为电线被切断了!)。
- 捎个话给……
- 既然机器人能够识别家庭成员,那么让它成为“信息记录员和提醒器”怎么样?我可以对机器人说:“机器人,提醒<人名>下午6点到车站接我。”然后,即使那位家庭成员把手机调成静音,或者正在听响亮的音乐,或者<插入不来车站接我的原因>,机器人也可以在家里四处游荡,找到那个人,并把信息传达给他们。
- 便携式亚马逊 Alexa
- 是的,你肯定已经注意到,通过加入Jasper库,我们可以开始复制亚马逊Alexa或Siri等的一些功能。
- 放鸡
- 这*必须*完成!……我打算至少制作一个版本的机器人,它能在花园里工作,照看鸡,确保它们晚上进窝(图像检测和自动追踪鸡,有没有人?!),当然,还要留意它们在哪里下蛋!
我列出了我在研究这个项目时找到的供应商/部件链接列表——如果您打算尝试类似的事情,请下载它——这可能会为您节省一些时间。
摘要
本文的要点是,如果你会编程,你就能真正建造一个机器人!……过去,硬件工程师和软件工程师之间存在着巨大的鸿沟——现在不再是这样了。低成本组件和开源库的可用性使得像这个机器人这样酷炫的项目比以往任何时候都更容易实现。投入物联网的怀抱吧,谁知道呢,你可能会创造出可以商业化的产品,在Kickstarter上众筹并致富。我们是开发者,我们创造东西——去吧,你知道你想要的,不试你永远不会知道:)
附言:一如既往,如果您喜欢这篇文章,请考虑投一票!
附录:投完票后<咳咳>,请过来这里轻松地看看当前的商用家用机器人。
历史
- 2016年6月30日 - 版本1
- 2016年8月3日 - 更正
- 2016年8月5日 - 添加了使用传感器附带代码示例的额外说明
- 2016年8月6日 - 添加了我在研究此项目时积累的供应商/零件链接列表
- 2016年8月7日 - 添加了有关商用家用机器人的报告链接
- 2016年8月12日 - 小幅更正/链接添加
- 2016年8月17日 - 小幅更正/链接添加