
Intel RealSense D415/435:C# 中的坐标映射
在过去的几个月里,我一直在深入研究 Intel RealSense D415 和 D435 深度摄像头。今天,我将向您展示如何轻松地在不同的坐标系之间进行转换。RealSense D415/435 是一款低成本设备……
在过去的几个月里,我一直在深入研究 Intel RealSense D415 和 D435 深度摄像头。今天,我将向您展示如何轻松地在不同的坐标系之间进行转换。RealSense D415/435 是一款低成本设备,可以为您的应用程序增强 3D 感知能力。其技术规格如下所示:
| 使用环境 | 室内/室外 |
|---|---|
| 深度技术 | 主动红外立体(全局快门) |
| 主要 Intel® RealSense™ 组件 | Intel® RealSense™ 视觉处理器 D4 Intel® RealSense™ 模块 D430 |
| 深度视场角(水平 × 垂直 × 对角线) | 86 x 57 x 94 (+/- 3°) |
| 深度流输出分辨率 | 高达 1280 x 720 |
| 深度流输出帧率 | 高达 90 fps |
| 最小深度距离(Min-Z) | 0.2 米 |
| 传感器快门类型 | 全局快门 |
| 最大范围 | 约 10.0 米 |
| RGB 传感器分辨率和帧率 | 1920 x 1080,30 fps |
| RGB 传感器视场角(水平 x 垂直 x 对角线) | 69.4° x 42.5° x 77° (+/- 3°) |
| 相机尺寸(长 x 深 x 高) | 90 毫米 x 25 毫米 x 25 毫米 |
| 连接器 | USB 3.0 Type – C |
| 安装机制 | 一个 1/4-20 UNC 螺纹安装点 两个 M3 螺纹安装点 |
什么是坐标映射?
使用深度摄像头时,最常见的任务之一是将 3D 世界空间坐标映射到 2D 屏幕空间坐标(反之亦然)。
3D 世界空间的坐标系以米为单位。因此,3D 点由 X、Y 和 Z 坐标集表示,分别对应水平、垂直和深度轴。3D 坐标系的原点 (0, 0, 0) 是摄像机的位置。

2D 屏幕空间的坐标系以像素为单位。2D 点由 X 和 Y 坐标集表示,分别对应帧的最左侧和最顶部位置。笛卡尔坐标系的 (0, 0) 原点是帧的左上角。RealSense 由 RGB 和深度传感器组成。这意味着每个传感器将生成两种离散的帧类型。目前,我们只关注深度帧。

坐标映射是在 3D 和 2D 系统之间进行转换的过程。
此类转换需要了解相机的内部配置(内部参数和外部参数)。内部和外部参数指定了诸如镜头畸变、焦点、图像格式、旋转矩阵等属性。因此,所需的数学转换通常由 SDK 内部执行。事实上,英特尔在其 **C++** 和 **Python** 框架中公开了这些转换。
如果您一直关注我的博客,您就知道我大部分商业应用程序都是用 C# 和 Unity3D 构建的。因此,令我非常惊讶的是,坐标映射功能并未包含在官方的 C# 框架中。这就是为什么我决定将原始 C++ 投影和去投影代码移植到 C#。
值得庆幸的是,C# API 已经包含了一个 **Intrinsics** 结构体。Intrinsics 结构体为我们提供了原始的相机内部参数。
背景(镜头、畸变、摄影)
请记住,我们将使用一些在摄影和摄影测量学中常见的术语。RealSense 内部参数如下:
宽度/高度
宽度和高度参数是相机图像的尺寸,以像素为单位。
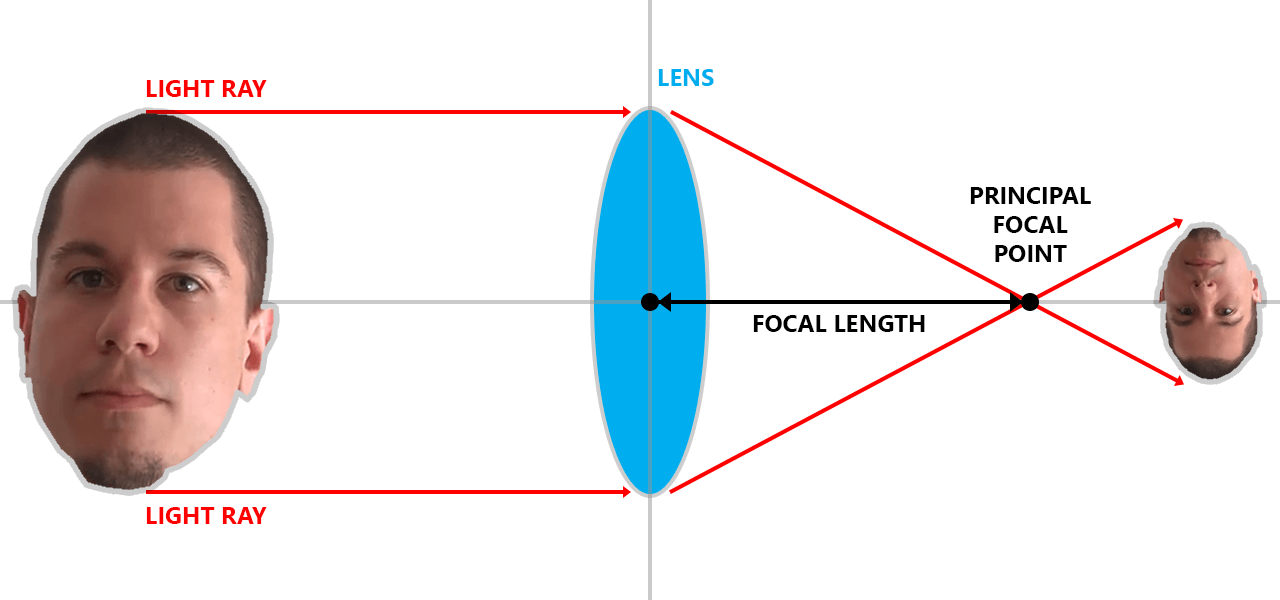
主点
您可以将主点视为相机中平行光线聚焦的点。主点的坐标存储在 **ppx** 和 **ppy** 值中。
焦距
焦距是从镜头中心到主点的距离。它由 **fx** 和 **fy** 参数表示。
下图将帮助您直观地理解这一概念。
畸变模型
镜头看到的世界并非一个完美的矩形框架。相反,框架会偏离其直线投影。这种偏离会导致鱼眼效应。如果我们知道畸变的系数,就可以“校正”它。校正使用 Brown-Conrady 变换。
畸变系数
畸变系数是数学上描述畸变的值,存储在 **coeffs** 矩阵中。
如果这一切看起来很难理解,那是因为它确实很难。不过别担心。我保证会为您处理好数学问题 
必备组件
要测试源代码,您需要一台 RealSense 摄像头,以及官方的 RealSense SDK for C# 或 Unity。
推荐的开发环境是 Visual Studio 2017 和 Unity3D。
3D 到 2D 映射
首先,我们将 3D 世界坐标转换为 2D 相机坐标。为了封装 3D 坐标,我创建了一个简单的 **Vector3D** 结构体(X、Y、Z 浮点值)。为了表示 2D 坐标,我创建了一个 **Vector2D** 结构体(X、Y 浮点值)。
public struct Vector3D
{
public float X;
public float Y;
public float Z;
}
public struct Vector2D
{
public float X;
public float Y;
}
当然,如果您愿意,也可以使用原生的 .NET 或 Unity 向量结构。
以下方法扩展了 Intrinsics 类。它接收一个 3D 点作为输入,并输出相应的 2D 坐标。如果转换因任何原因失败,将返回 (0,0) 点。
public static Vector2D Map3DTo2D(this Intrinsics intrinsics, Vector3D point)
{
Vector2D pixel = new Vector2D();
float x = point.X / point.Z;
float y = point.Y / point.Z;
if (intrinsics.model == Distortion.ModifiedBrownConrady)
{
float r2 = x * x + y * y;
float f = 1f + intrinsics.coeffs[0] * r2 + intrinsics.coeffs[1] * r2 * r2 + intrinsics.coeffs[4] * r2 * r2 * r2;
x *= f;
y *= f;
float dx = x + 2f * intrinsics.coeffs[2] * x * y + intrinsics.coeffs[3] * (r2 + 2 * x * x);
float dy = y + 2f * intrinsics.coeffs[3] * x * y + intrinsics.coeffs[2] * (r2 + 2 * y * y);
x = dx;
y = dy;
}
if (intrinsics.model == Distortion.Ftheta)
{
float r = (float)Math.Sqrt(x * x + y * y);
float rd = (1f / intrinsics.coeffs[0] * (float)Math.Atan(2f * r * (float)Math.Tan(intrinsics.coeffs[0] / 2f)));
x *= rd / r;
y *= rd / r;
}
pixel.X = x * intrinsics.fx + intrinsics.ppx;
pixel.Y = y * intrinsics.fy + intrinsics.ppy;
return pixel;
}
2D 到 3D 映射
现在,我们将执行相反的操作:将 2D 点映射到 3D 空间。为此,我们需要了解几件事:
- 2D 点的 X 和 Y,以及
- 2D 点的深度
所需点的深度可以通过调用 DepthFrame 类的 GetDistance() 方法来找到。
float depth = depthFrame.GetDistance(x, y);
有了这些输入,以下方法将把 2D 屏幕坐标转换为 3D 世界坐标:
public static Vector3D Map2DTo3D(this Intrinsics intrinsics, Vector2D pixel, float depth)
{
Vector3D point = new Vector3D();
float x = (pixel.X - intrinsics.ppx) / intrinsics.fx;
float y = (pixel.Y - intrinsics.ppy) / intrinsics.fy;
if (intrinsics.model == Distortion.InverseBrownConrady)
{
float r2 = x * x + y * y;
float f = 1 + intrinsics.coeffs[0] * r2 + intrinsics.coeffs[1] * r2 * r2 + intrinsics.coeffs[4] * r2 * r2 * r2;
float ux = x * f + 2 * intrinsics.coeffs[2] * x * y + intrinsics.coeffs[3] * (r2 + 2 * x * x);
float uy = y * f + 2 * intrinsics.coeffs[3] * x * y + intrinsics.coeffs[2] * (r2 + 2 * y * y);
x = ux;
y = uy;
}
point.X = depth * x;
point.Y = depth * y;
point.Z = depth;
return point;
}
2D 颜色到深度映射
最后,还有另一种坐标映射场景:在 2D **颜色**坐标和 2D **深度**坐标之间进行转换。C# SDK 为此目的提供了 **Align** 类,因此您可以参考官方文档了解使用说明。
摘要
各位,这就是全部内容!供您参考,这是完整的源代码:
using Intel.RealSense;
using System;
namespace Intel.RealSense.Extensions
{
/// <summary>
/// Converts between 2D and 3D RealSense coordinates.
/// </summary>
public static class CoordinateMapper
{
/// <summary>
/// Maps the specified 3D point to the 2D space.
/// </summary>
/// <param name="intrinsics">The camera intrinsics to use.</param>
/// <param name="point">The 3D point to map.</param>
/// <returns>The corresponding 2D point.</returns>
public static Vector2D Map3DTo2D(this Intrinsics intrinsics, Vector3D point)
{
Vector2D pixel = new Vector2D();
float x = point.X / point.Z;
float y = point.Y / point.Z;
if (intrinsics.model == Distortion.ModifiedBrownConrady)
{
float r2 = x * x + y * y;
float f = 1f + intrinsics.coeffs[0] * r2 + intrinsics.coeffs[1] * r2 * r2 + intrinsics.coeffs[4] * r2 * r2 * r2;
x *= f;
y *= f;
float dx = x + 2f * intrinsics.coeffs[2] * x * y + intrinsics.coeffs[3] * (r2 + 2 * x * x);
float dy = y + 2f * intrinsics.coeffs[3] * x * y + intrinsics.coeffs[2] * (r2 + 2 * y * y);
x = dx;
y = dy;
}
if (intrinsics.model == Distortion.Ftheta)
{
float r = (float)Math.Sqrt(x * x + y * y);
float rd = (1f / intrinsics.coeffs[0] * (float)Math.Atan(2f * r * (float)Math.Tan(intrinsics.coeffs[0] / 2f)));
x *= rd / r;
y *= rd / r;
}
pixel.X = x * intrinsics.fx + intrinsics.ppx;
pixel.Y = y * intrinsics.fy + intrinsics.ppy;
return pixel;
}
/// <summary>
/// Maps the specified 2D point to the 3D space.
/// </summary>
/// <param name="intrinsics">The camera intrinsics to use.</param>
/// <param name="pixel">The 2D point to map.</param>
/// <param name="depth">The depth of the 2D point to map.</param>
/// <returns>The corresponding 3D point.</returns>
public static Vector3D Map2DTo3D(this Intrinsics intrinsics, Vector2D pixel, float depth)
{
Vector3D point = new Vector3D();
float x = (pixel.X - intrinsics.ppx) / intrinsics.fx;
float y = (pixel.Y - intrinsics.ppy) / intrinsics.fy;
if (intrinsics.model == Distortion.InverseBrownConrady)
{
float r2 = x * x + y * y;
float f = 1 + intrinsics.coeffs[0] * r2 + intrinsics.coeffs[1] * r2 * r2 + intrinsics.coeffs[4] * r2 * r2 * r2;
float ux = x * f + 2 * intrinsics.coeffs[2] * x * y + intrinsics.coeffs[3] * (r2 + 2 * x * x);
float uy = y * f + 2 * intrinsics.coeffs[3] * x * y + intrinsics.coeffs[2] * (r2 + 2 * y * y);
x = ux;
y = uy;
}
point.X = depth * x;
point.Y = depth * y;
point.Z = depth;
return point;
}
}
/// <summary>
/// Represensts a 2D vector/point.
/// </summary>
public struct Vector2D
{
public float X;
public float Y;
}
/// <summary>
/// Represensts a 3D vector/point.
/// </summary>
public struct Vector3D
{
public float X;
public float Y;
public float Z;
}
}
好了,现在您可以在 C# 和 Unity 应用程序中使用 RealSense 的全部强大功能了!
下次见……继续编码!
文章 Intel RealSense D415/435:C# 中的坐标映射 最初发布于 Vangos Pterneas。