
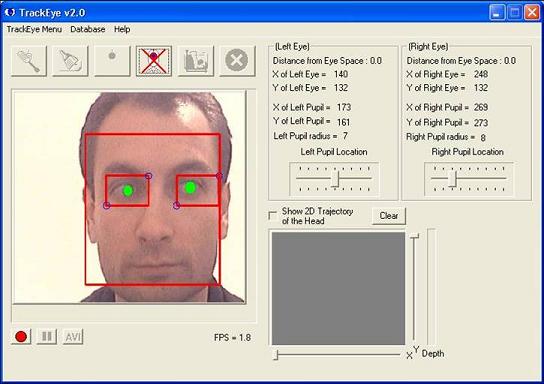
TrackEye:使用网络摄像头实时追踪人眼
4.95/5 (110投票s)
使用网络摄像头在视频序列中实时追踪人眼,
引言
眼睛是人脸最重要的特征。因此,在用户与计算机界面中有效利用眼球运动作为一种交流技术,可以在各种应用领域找到用武之地。
眼球跟踪以及眼球特征提供的信息有潜力成为人机交互(HCI)系统中与计算机交流的有趣方式。因此,在这样的动机下,设计一个实时眼球特征跟踪软件是本项目的目标。
本项目旨在实现一个具有以下功能的实时眼部特征跟踪器
- 实时人脸跟踪,具有尺度和旋转不变性
- 单独跟踪眼部区域
- 跟踪眼部特征
- 查找注视方向
- 使用眼球运动进行远程控制
运行和重新构建 TrackEye 的说明
安装说明
- 解压TrackEye_Executable.zip文件。在运行TrackEye_636.exe之前,将SampleHUE.jpg和SampleEye.jpg两个文件复制到C:\文件夹。这两个文件用于CAMSHIFT和模板匹配算法。
- 用户运行软件无需遵循其他步骤。没有DLL依赖项,因为软件是使用静态链接的DLL构建的。
要实现良好的跟踪需要进行的设置
人脸和眼睛检测设置
在 TrackEye 菜单 --> Tracker Settings 下
- 输入源:视频
- 点击 Select file 并选择..\Avis\Sample.avi
- 人脸检测算法:Haar 人脸检测算法
- 勾选“Track also Eyes”复选框
- 眼睛检测算法:自适应 PCA
- 取消勾选“Variance Check”
- 数据库图像数量:8
- EigenEyes 数量:5
- 眼睛空间允许的最大距离:1200
- 人脸宽度/眼部模板宽度比:0.3
- PCA 过程中使用的
ColorSpace类型:CV_RGB2GRAY
瞳孔检测设置
勾选“Track eyes in details”,然后勾选“Detect also eye pupils”。点击“Adjust Parameters”按钮
- 在“Threshold Value”中输入“120”
- 点击“Save Settings”,然后点击“Close”
Snake 设置
勾选“Indicate eye boundary using active snakes”。点击“Settings for snake”按钮
- 选择使用的
ColorSpace:CV_RGB2GRAY - 选择 Simple thresholding 并输入 100 作为“Threshold value”
- 点击“Save Settings”,然后点击“Close”
背景
到目前为止,在眼球检测方面已经做了大量工作,在项目之前,对先前的方法进行了仔细研究,以确定实现的方法。我们可以将与眼球相关的研究分为以下两类:
基于专用设备的方法
这类研究使用必要的设备,这些设备将发出与眼球在眼眶中位置成比例的某种信号。目前使用的各种方法包括眼电图、红外眼动仪、巩膜搜索线圈。这些方法完全不在我们项目的范围内。
基于图像的方法
基于图像的方法在图像上执行眼球检测。大多数基于图像的方法都试图利用眼球的特征来检测眼球。迄今为止使用的方法包括基于知识的方法、基于特征的方法(颜色、梯度)、简单的模板匹配、外观方法。另一种有趣的方法是“可变形模板匹配”,它基于通过最小化几何模型的能量来匹配眼球的几何模板。
TrackEye 的实现
实现的项目的三个组成部分
- 人脸检测:执行尺度不变人脸检测
- 眼球检测:此步骤的结果是检测到双眼
- 眼部特征提取:在此步骤结束时提取眼部特征
人脸检测
项目中实现了两种不同的方法。它们是
- 连续自适应均值漂移算法
- Haar 人脸检测方法
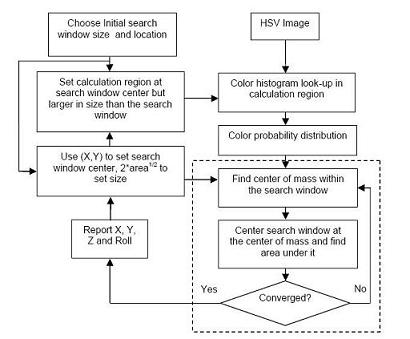
连续自适应均值漂移算法
自适应均值漂移算法用于跟踪人脸,它基于鲁棒的非参数技术,通过爬升密度梯度来寻找概率分布的模式(峰值),即均值漂移算法。随着视频序列中人脸的跟踪,均值漂移算法被修改以处理动态变化的颜色概率分布问题。算法的框图如下所示:
Haar-人脸检测方法
第二种人脸检测算法基于一个使用 Haar 类特征的分类器(即使用 Haar 类特征的增强分类器级联)。首先,它使用几百个正面样本视图进行训练。在训练好分类器后,可以将其应用于输入图像中的感兴趣区域。如果该区域可能显示人脸,则分类器输出“1”,否则输出“0”。为了在整个图像中搜索对象,可以将搜索窗口在图像上移动,并使用分类器检查每个位置。该分类器设计得可以轻松地“调整大小”,以便能够以不同的大小找到感兴趣的对象,这比调整图像本身的大小更有效。
眼球检测
项目中实现了两种不同的方法
- 模板匹配
- 自适应
EigenEye方法
模板匹配
模板匹配是一种众所周知的对象检测方法。在我们的模板匹配方法中,手动创建了一个标准的眼部图案,并给定输入图像,为眼部计算与标准图案的相关值。眼部的存在是根据相关值确定的。这种方法具有易于实现的优点。然而,它有时可能不足以进行眼球检测,因为它无法有效处理尺度、姿势和形状的变化。
自适应 EigenEye 方法
自适应EigenEye方法基于著名的EigenFaces方法。但是,由于该方法用于眼球检测,我们称之为“EigenEye方法”。主要思想是将眼球图像分解为一小组特征图像,称为 eigeneyes,这可以被认为是原始图像的主成分。这些 eigeneyes 作为称为 eyespace 的子空间的正交基向量。然而,我们知道eigenface方法不是尺度不变的。为了提供尺度不变性,我们可以使用人脸检测算法收集的信息(EyeWidth / FaceWidth ? 0.35)一次调整眼球数据库的大小,我们就可以使用一个数据库实现尺度不变检测。
用于对象跟踪和检测的 OpenCV 函数
OpenCV库提供了大量的图像处理和对象跟踪与检测库。项目中使用的主要函数及其用法如下:
Haar-人脸跟踪示例代码
void CTrackEyeDlg::HaarFaceDetect( IplImage* img, CvBox2D* faceBox)
{
int scale = 2;
IplImage* temp = cvCreateImage( cvSize(img->width/2,img->height/2), 8, 3 );
CvPoint pt1, pt2;
int i;
cvPyrDown( img, temp, CV_GAUSSIAN_5x5 );
#ifdef WIN32
cvFlip( temp, temp, 0 );
#endif
cvClearMemStorage( storage );
if( hid_cascade )
{
CvSeq* faces = cvHaarDetectObjects( temp, hid_cascade, storage, 1.2, 2,
CV_HAAR_DO_CANNY_PRUNING );
NumOfHaarFaces = faces->total;
if (NumOfHaarFaces > 0)
{
CvRect* r = (CvRect*)cvGetSeqElem( faces, 0, 0 );
pt1.x = r->x*scale;
pt2.x = (r->x+r->width)*scale;
#ifdef WIN32
pt1.y = img->height - r->y*scale;
pt2.y = img->height - (r->y+r->height)*scale;
#else
pt1.y = r->y*scale;
pt2.y = (r->y+r->height)*scale;
#endif
faceBox->center.x = (float)(pt1.x+pt2.x)/2.0;
faceBox->center.y = (float)(pt1.y+pt2.y)/2;
faceBox->size.width = (float)(pt2.x - pt1.x);
faceBox->size.height = (float)(pt1.y - pt2.y);
}
}
cvShowImage( "Tracking", img );
cvReleaseImage( &temp );
}
CamShift 算法示例代码
// Inputs for CamShift algorithm
IplImage* HUE = cvCreateImage(cvGetSize(SampleForHUE), IPL_DEPTH_8U, 1);
extractHUE(SampleForHUE, HUE); // ** Extract HUE information
int hist_size = 20;
float ranges[] = { 0, 180 };
float* pranges[] = {ranges};
hist = cvCreateHist( 1, &hist_size, CV_HIST_ARRAY, pranges, 1 );
cvCalcHist(&HUE, hist); // Calculate histogram of HUE part
hueFrame = cvCreateImage(cvGetSize(CameraFrame), IPL_DEPTH_8U, 1);
backProject = cvCreateImage(cvGetSize(CameraFrame), IPL_DEPTH_8U, 1);
extractHUE(CameraFrame, hueFrame);
while (trackControl != 0)
{
extractHUE( CameraFrame, hueFrame );
cvCalcBackProject( &hueFrame, backProject, hist ); // Probability is formed
//cvShowImage("Tester2", backProject);
cvCamShift( backProject, searchWin, cvTermCriteria( CV_TERMCRIT_EPS |
CV_TERMCRIT_ITER, 15, 0.1 ), &comp, &faceBox );
searchWin = comp.rect;
}
模板匹配示例代码
// Template Matching for Eye detection
void Face::findEyes_TM(IplImage* faceImage, TrackingSettings* settings)
{
CvSize faceSize; faceSize = cvGetSize(faceImage);
// Load Template from the eye database
CString fileName;
// Name of the template for left eye
fileName.Format("%s\\eye%d.jpg", settings->params->DBdirectory, 0);
IplImage* eyeImage_Left = cvLoadImage(fileName, -1);
// Name of the template for left eye
fileName.Format("%s\\eye%d.jpg", settings->params->DBdirectory, 1);
IplImage* eyeImage_Right = cvLoadImage(fileName, -1);
IplImage* tempTemplateImg_Left; IplImage* tempTemplateImg_Right;
IplImage* templateImg_Left; IplImage* templateImg_Right;
if (eyeImage_Left == NULL || eyeImage_Right == NULL)
{
MessageBox(NULL, "Templates can not be loaded.\n
Please check your eye database folder", "Error", MB_OK||MB_ICONSTOP);
exit(1);
}
else
{
// Change color space according to the settings entered by the user
tempTemplateImg_Left = cvCreateImage(cvGetSize(eyeImage_Left), IPL_DEPTH_8U, 1);
changeColorSpace(settings, eyeImage_Left, tempTemplateImg_Left);
tempTemplateImg_Right =
cvCreateImage(cvGetSize(eyeImage_Right), IPL_DEPTH_8U, 1);
changeColorSpace(settings, eyeImage_Right, tempTemplateImg_Right);
float idealWidth = faceSize.width * settings->params->ratio;
float conversionRatio = idealWidth/(float)tempTemplateImg_Left->width;
CvSize newSize;
newSize.width = (int)idealWidth;
newSize.height = (int)(tempTemplateImg_Left->height*conversionRatio);
templateImg_Left = cvCreateImage(newSize, IPL_DEPTH_8U, 1);
cvResize(tempTemplateImg_Left, templateImg_Left, CV_INTER_LINEAR); // was NN
cvReleaseImage(&eyeImage_Left);
cvReleaseImage(&tempTemplateImg_Left);
templateImg_Right = cvCreateImage(newSize, IPL_DEPTH_8U, 1);
cvResize(tempTemplateImg_Right, templateImg_Right, CV_INTER_LINEAR); // was NN
cvReleaseImage(&eyeImage_Right);
cvReleaseImage(&tempTemplateImg_Right);
}
// *************************************************************
// ************Search faceImage for eyes************************
// *************************************************************
IplImage* GRAYfaceImage = cvCreateImage(faceSize, IPL_DEPTH_8U, 1);
changeColorSpace(settings, faceImage, GRAYfaceImage);
//cvCvtColor( faceImage, GRAYfaceImage, CV_RGB2GRAY);
//GRAYfaceImage->origin = 1;
// ** Warning at this point image origin is bottom-left corner.
// ** Eye1 search area
int x_left = 0;
int y_left = 0;
int width_left = (int)((float)(faceSize.width/2.0));
int height_left = (int)((float)(faceSize.height));
CvRect rect_Eye1 = cvRect(x_left, y_left, width_left, height_left);
CvMat* Eye1Image = cvCreateMat(width_left, height_left, CV_8UC1);
cvGetSubRect(GRAYfaceImage, Eye1Image, rect_Eye1 );
cvFlip( Eye1Image, Eye1Image, 0);
// ** Eye2 search area
int x_right= (int)((float)(faceSize.width/2.0));
int y_right = 0;
int width_right = (int)((float)(faceSize.width/2.0));
int height_right = (int)((float)(faceSize.height));
CvRect rect_Eye2 = cvRect(x_right, y_right, width_right, height_right);
CvMat* Eye2Image = cvCreateMat(width_right, height_right, CV_8UC1);
cvGetSubRect(GRAYfaceImage, Eye2Image, rect_Eye2 );
cvFlip( Eye2Image, Eye2Image, 0);
// OpenCV says that size of the result must be the following:
CvSize size;
size.height= Eye1Image->height - templateImg_Left->height + 1;
size.width = Eye1Image->width - templateImg_Left->width + 1;
IplImage* result1 = cvCreateImage( size,IPL_DEPTH_32F,1);
IplImage* result2 = cvCreateImage( size,IPL_DEPTH_32F,1);
// Left Eye
cvMatchTemplate( Eye1Image, templateImg_Left, result1, settings->params->tempMatch);
// Right Eye
cvMatchTemplate( Eye2Image, templateImg_Right, result2, settings->params->tempMatch);
// find the best match location - LEFT EYE
double minValue1, maxValue1;
CvPoint minLoc1, maxLoc1;
cvMinMaxLoc( result1, &minValue1, &maxValue1, &minLoc1, &maxLoc1 );
cvCircle( result1, maxLoc1, 5, settings->programColors.colors[2], 1 );
// transform point back to original image
maxLoc1.x += templateImg_Left->width / 2;
maxLoc1.y += templateImg_Left->height / 2;
settings->params->eye1.coords.x = maxLoc1.x;
settings->params->eye1.coords.y = maxLoc1.y;
settings->params->eye1.RectSize.width = templateImg_Left->width;
settings->params->eye1.RectSize.height = templateImg_Left->height;
settings->params->eye1.eyefound = true;
// find the best match location - RIGHT EYE
double minValue2, maxValue2;
CvPoint minLoc2, maxLoc2;
cvMinMaxLoc( result2, &minValue2, &maxValue2, &minLoc2, &maxLoc2 );
cvCircle( result2, maxLoc2, 5, settings->programColors.colors[2], 1 );
// transform point back to original image
maxLoc2.x += templateImg_Left->width / 2;
maxLoc2.y += templateImg_Left->height / 2;
settings->params->eye2.coords.x = maxLoc2.x+(int)faceSize.width/2;
settings->params->eye2.coords.y = maxLoc2.y;
settings->params->eye2.RectSize.width = templateImg_Left->width;
settings->params->eye2.RectSize.height = templateImg_Left->height;
settings->params->eye2.eyefound = true;
cvCircle( Eye1Image, maxLoc1, 5, settings->programColors.colors[2], 1 );
cvCircle( Eye2Image, maxLoc2, 5, settings->programColors.colors[2], 1 );
}
自适应 EigenEye 方法示例代码
void Face::findEyes(IplImage* faceImage, TrackingSettings* settings)
{
IplImage** images = (IplImage**)malloc(sizeof(IplImage*)*numOfImages);
IplImage** eigens = (IplImage**)malloc(sizeof(IplImage*)*numOfImages);
IplImage* averageImage;
IplImage* projection;
CvSize faceSize; faceSize = cvGetSize(faceImage);
eigenSize newEigenSize;
newEigenSize.width = faceSize.width * settings->params->ratio;
newEigenSize.conversion = ((float)newEigenSize.width) / ((float)database[0]->width);
newEigenSize.height = ((float)database[0]->height) * newEigenSize.conversion;
CvSize newSize;
newSize.width = (int)newEigenSize.width;
newSize.height = (int)newEigenSize.height;
IplImage* tempImg = cvCreateImage( newSize, IPL_DEPTH_8U, 1);
// **********Initializations**********
for (int i=0; iparams->nImages; i++)
{
images[i] = cvCreateImage(newSize, IPL_DEPTH_8U, 1);
cvResize(database[i], images[i], CV_INTER_LINEAR); // was NN
}
cvShowImage("Eigen", images[0]);
cvReleaseImage(&tempImg);
// Create space for EigenFaces
for (i=0; iparams->nImages; i++)
eigens[i] = cvCreateImage(cvGetSize(images[0]), IPL_DEPTH_32F, 1);
averageImage = cvCreateImage(cvGetSize(images[0]), IPL_DEPTH_32F, 1);
projection = cvCreateImage(cvGetSize(images[0]), IPL_DEPTH_8U, 1);
// *************************************************************
// ************Calculate EigenVectors & EigenValues*************
// *************************************************************
CvTermCriteria criteria;
criteria.type = CV_TERMCRIT_ITER|CV_TERMCRIT_EPS;
criteria.maxIter = 13;
criteria.epsilon = 0.1;
// ** n was present instead of numOfImages
cvCalcEigenObjects( settings->params->nImages, images, eigens,
0, 0, 0, &criteria, averageImage, vals );
// *************************************************************
// ************Search faceImage for eyes************************
// *************************************************************
IplImage* GRAYfaceImage = cvCreateImage(faceSize, IPL_DEPTH_8U, 1);
changeColorSpace(settings,faceImage, GRAYfaceImage);
//cvCvtColor( faceImage, GRAYfaceImage, CV_RGB2GRAY);
// ** Warning at this point image origin is bottom-left corner.
GRAYfaceImage->origin = 1;
int MARGIN = settings->params->MaxError;
double minimum = MARGIN; double distance = MARGIN;
// ** Eye1 search Space
settings->params->eye1.xlimitLeft = 0;
settings->params->eye1.xlimitRight = faceSize.width/2.0 - images[0]->width - 1;
settings->params->eye1.ylimitUp =
(int)( ((float)faceSize.height)*0.75 - images[0]->height - 1);
settings->params->eye1.ylimitDown = faceSize.height/2;
// ** Eye2 search Space
settings->params->eye2.xlimitLeft = faceSize.width/2.0;
settings->params->eye2.xlimitRight = faceSize.width - images[0]->width - 1;
settings->params->eye2.ylimitUp =
(int)( ((float)faceSize.height)*0.75 - images[0]->height - 1);
settings->params->eye2.ylimitDown = faceSize.height/2;
settings->params->eye1.initializeEyeParameters();
settings->params->eye2.initializeEyeParameters();
settings->params->eye1.RectSize.width = images[0]->width;
settings->params->eye1.RectSize.height = images[0]->height;
settings->params->eye2.RectSize.width = images[0]->width;
settings->params->eye2.RectSize.height = images[0]->height;
IplImage* Image2Comp = cvCreateImage(cvGetSize(images[0]), IPL_DEPTH_8U, 1);
int x,y;
// ** Search left eye i.e eye1
for (y=settings->params->eye1.ylimitDown; yparams->eye1.ylimitUp; y+=2)
{
for (x=settings->params->eye1.xlimitLeft; xparams->eye1.xlimitRight; x+=2)
{
cvSetImageROI(GRAYfaceImage, cvRect
(x, y, images[0]->width, images[0]->height));
if (settings->params->varianceCheck == 1 )
{
if (calculateSTD(GRAYfaceImage) <= (double)(settings->params->variance))
{
cvResetImageROI(GRAYfaceImage);
continue;
}
}
cvFlip( GRAYfaceImage, Image2Comp, 0);
cvResetImageROI(GRAYfaceImage);
// Decide whether it is an eye or not
cvEigenDecomposite( Image2Comp, settings->params->nEigens,
eigens, 0, 0, averageImage, weights );
cvEigenProjection( eigens, settings->params->nEigens,
CV_EIGOBJ_NO_CALLBACK, 0, weights, averageImage, projection );
distance = cvNorm(Image2Comp, projection, CV_L2, 0);
if (distance < minimum && distance > 0)
{
settings->params->eye1.eyefound = true;
minimum = distance;
settings->params->eye1.distance = distance;
settings->params->eye1.coords.x = x;
settings->params->eye1.coords.y = y;
}
}
}
minimum = MARGIN; distance = MARGIN;
// ** Search right eye i.e eye2
for (y=settings->params->eye2.ylimitDown; yparams->eye2.ylimitUp; y+=2)
{
for (x=settings->params->eye2.xlimitLeft; xparams->eye2.xlimitRight; x+=2)
{
cvSetImageROI(GRAYfaceImage,
cvRect(x, y, images[0]->width, images[0]->height));
if (settings->params->varianceCheck == 1)
{
if (calculateSTD(GRAYfaceImage) <= (double)(settings->params->variance))
{
cvResetImageROI(GRAYfaceImage);
continue;
}
}
cvFlip( GRAYfaceImage, Image2Comp, 0);
cvResetImageROI(GRAYfaceImage);
// ** Decide whether it is an eye or not
cvEigenDecomposite( Image2Comp, settings->params->nEigens,
eigens, 0, 0, averageImage, weights );
cvEigenProjection( eigens, settings->params->nEigens,
0, 0, weights, averageImage, projection );
distance = cvNorm(Image2Comp, projection, CV_L2, 0);
if (distance < minimum && distance > 0)
{
settings->params->eye2.eyefound = true;
minimum = distance;
settings->params->eye2.distance = distance;
settings->params->eye2.coords.x = x;
settings->params->eye2.coords.y = y;
}
}
}
cvReleaseImage(&Image2Comp);
// ** Cleanup
cvReleaseImage(&GRAYfaceImage);
for (i=0; iparams->nImages; i++)
cvReleaseImage(&images[i]);
for (i=0; iparams->nImages; i++)
cvReleaseImage(&eigens[i]);
cvReleaseImage(&averageImage);
cvReleaseImage(&projection);
free(images);
free(eigens);
}
历史
- v 1.0:
TrackEye的第一个版本 - v 2.0:
TrackEye的第二个版本 TrackEyev2.0 现在支持- 两种不同的人脸检测算法
- Haar 人脸跟踪
- CAMSHIFT
- 两种不同的眼球检测算法
- 自适应主成分分析
- 模板匹配
- 用户可以在流程开始时通过 GUI 选择跟踪算法。
- 可选输入源
- 网络摄像头
- 视频文件
* 请注意,TrackEye是用OpenCV Library v3.1编写的,所以在重新构建时请确保使用它。